4.3 常用网络层
本小节将介绍几个常用的layers,核心目的是传授如何学习各layers的方法,今后更多layers也可自行从官方文档中学习。
Convolutional Layers
卷积整体分两大类,正常卷积与转置卷积(Transpose Convolution),除此之外还有Lazy系列的正常卷积与转置卷积,Lazy系列就是懒惰系列,为那些懒得计算输入特征图的通道数的使用者而设计,经过第一次forward之后,该网络层的in_channels将被确定。
下面通过官方文档详细学习Conv2d这个卷积层,在文档中会详细介绍该层的功能,各参数含义,计算公式,以及示例代码。
torch.nn.Conv2d(in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1, bias=True, padding_mode='zeros')
主要功能:对多个二维平面组成的信号进行二维卷积
主要参数:
- in_channels (int) – Number of channels in the input image。输入这个网络层的图像的通道数是多少。
- out_channels (int) – Number of channels produced by the convolution。此网络层输出的特征图的通道数是多少,等价于卷积核数量是多少。
- kernel_size (int or tuple) – Size of the convolving kernel。卷积核大小。
- stride (int or tuple, optional) – Stride of the convolution. Default: 1。卷积核卷积过程的步长。
- padding (int, tuple or str, optional) – Padding added to all four sides of the input. Default: 0。对于输入图像的四周进行填充的数量进行控制,可指定填充像素数量,也可以指定填充模式,如"same", "valid",具体含义参见文档,这是从TF中借鉴过来的。
- padding_mode (string, optional) – 'zeros', 'reflect', 'replicate' or 'circular'. Default: 'zeros'。填充的像素值如何确定。默认填充0。
- dilation (int or tuple, optional) – Spacing between kernel elements. Default: 1。孔洞卷积的孔洞大小。
- groups (int, optional) – Number of blocked connections from input channels to output channels. Default: 1。分组卷积的分组。
- bias (bool, optional) – If True, adds a learnable bias to the output. Default: True。是否采用偏置。
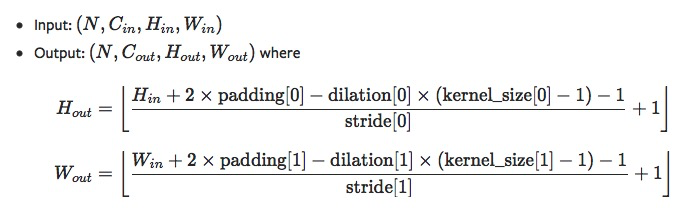
nn.Conv2d是图像领域里99%模型都用到的,它的计算公式及细节需要大家了如指掌,具体公式如下:`
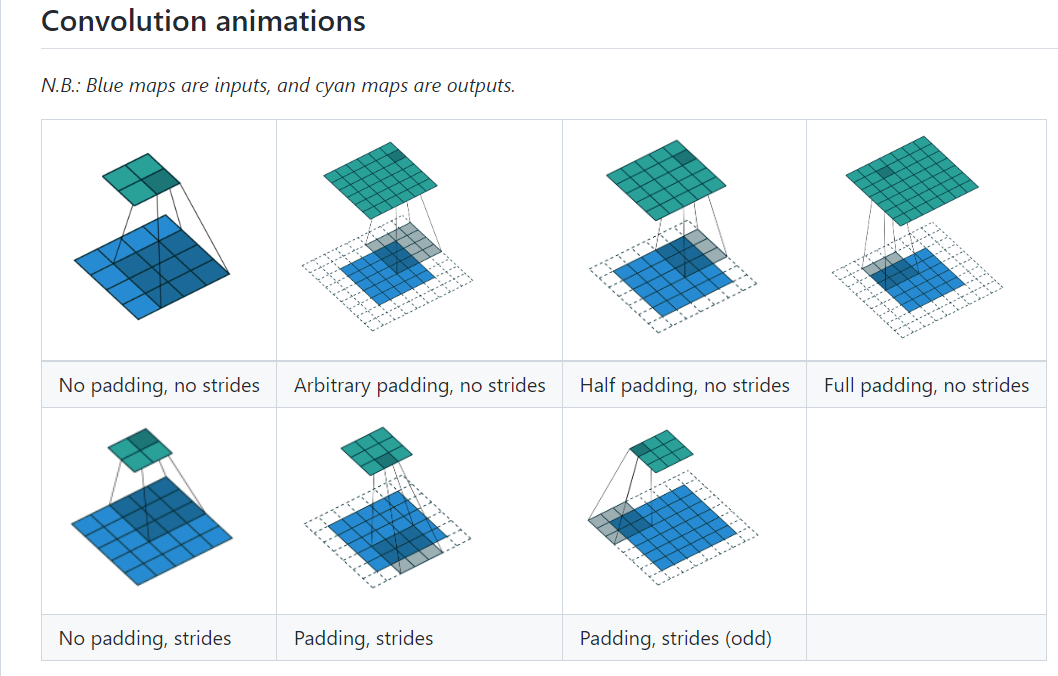
这里建议大家结合各种动图进行学习,推荐这个repo,
Pooling Layers
Pooling layer叫池化层,池化是形象词,就像下雨天篮球场上低洼的地方会聚集周围的雨水一样,由大变小的过程。
自然它的作用是将特征图分辨率变小,通常减小一半。如下图所示,相同颜色的区域”池化“为1个像素,4x4的图像变为了2x2的图像。
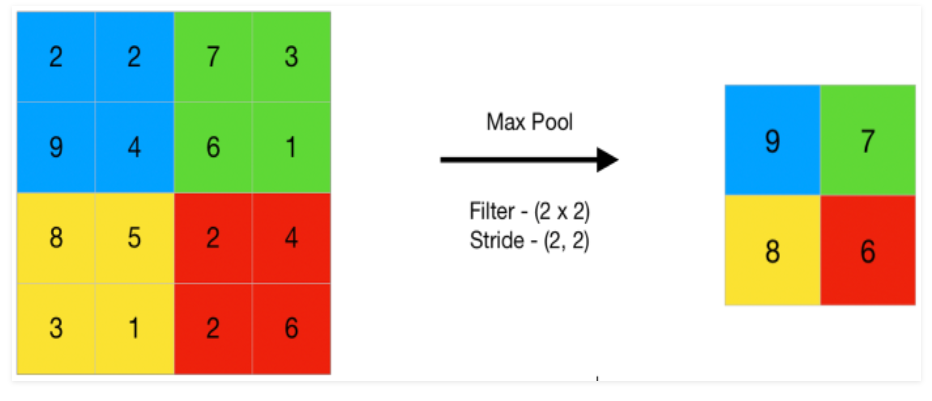
图片来源:https://www.geeksforgeeks.org/cnn-introduction-to-pooling-layer/
1个像素代替4个像素,那应该用什么值呢?针对这个问题,可对池化层进行划分,分为最大值池化、平均值池化、分数阶池化、基于范数的池化。分别对应torch.nn中的Maxpool, Avgpool, FractionalMaxPool, LPPool。
由于它们只是在计算像素时才用的方法不同,下面就以Maxpool为例讲解池化层。
torch.nn.MaxPool2d(kernel_size, stride=None, padding=0, dilation=1, return_indices=False, ceil_mode=False)
功能:2D最大池化
参数:
- kernel_size – 池化窗口大小
- stride – 滑窗步长
- padding – 原图填充大小
- dilation – 孔洞大小
- return_indices – 是否返回最大值所在位置,主要在 torch.nn.MaxUnpool2d 中使用,是上采样的一种策略
- ceil_mode – 当无法整除时,是向下取整还是向上取整,默认为向下取整。
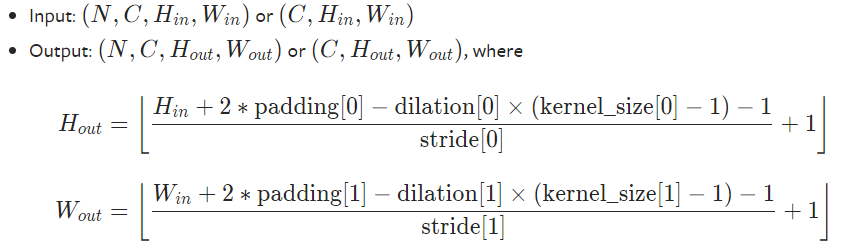
池化层输出特征图的大小计算公式如下,细心的朋友会发现它与卷积层是一样的。
针对最大池化还有一个特殊的地方是它可以记录最大值所在的位置,供上采样时(MaxUnpool2d)所用,这个在图像分割任务中会有涉及。MaxUnpool2d的使用非常简单,参数设置很容易。原型如下:
torch.nn.MaxUnpool2d(kernel_size, stride=None, padding=0),具体使用可看配套代码。
自适应池化层
上面针对池化像素如何取值进行划分,其实针对窗口大小的选择也可划分,还有另外一种特殊的池化方法,那就是AdaptiveXpool, 它的作用是自适应窗口大小,保证经过池化层之后的图像尺寸是固定的,这个在接入全连接层之前经常会见到。
使用也很方便,只需要设置想要的输出大小即可,详细可见配套代码。torch.nn.AdaptiveMaxPool2d(output_size, return_indices=False)
Padding Layers
Padding layer在许多魔改网络中常用到,功能是给特征图周围填充一定的像素,调整特征图分辨率的一种方法。既然是填充就涉及两个问题,填充多少个像素?像素应该如何确定?
针对第二个问题,可将padding layer划分为三类,镜像填充、边界重复填充,指定值填充、零值填充,分别对应nn的三大类,nn.ReflectionPad2d, nn.ReplicationPad2d, nn.ZeroPad2d, nn.ConstantPad2d,使用非常简单,详细可见配套代码。
Linear Layers
Linear Layers包含4个层分别是nn.Identity,nn.Linear, nn.Bilinear, nn.LazyLinear
nn.Identity 是恒等映射,不对输入做任何变换,它通常用于占位。
nn.Linear 就是大家熟悉的全连接层(Fully Connection Layer),可实现 y= Wx + b
nn.Bilinear 是双线性层,它有两个输入,实现公式 y = x1Wx2 +b
nn.LazyLinear 是nn.Linear的lazy版本,也就是懒惰的Linear层,它在第一次推理时自动根据输入特征图的尺寸来设定in_features,免去了手动计算in_features的麻烦。
Linear层十分简单,就不用代码演示了。
Normaliation Layers
Normaliation Layers 里包含主流的标准化网络层,分别有BN、LN、IN、GN以及早期的LRN。这一些列的层已经成为现在深度学习模型的标配,它们充当一种正则,对数据的分布进行变换,使数据分布变到0均值,1标准差的形式。实验结果发现这样做可以加速模型训练,让模型更稳定,精度更高。
其中最出名的当属2015年提出的BatchNorm, 来自于Google团队的Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift,关于BN的介绍网上有很多文章,大家可自行学习,在代码实现上我们需要熟悉网络层内部的参数,以及训练与推理过程中的差异。
BatchNorm 会对输入进行减均值、除以标准差、乘以γ、加β的操作。如下图所示:
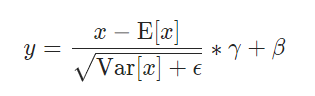
其中γ与β是Parameter,是可训练的参数,与卷积层的卷积核、FC层的权重一样,容易理解。
均值与标准差就没那么简单了,在训练过程,它们是通过指数移动平均统计得来,在测试时则是用固定的、不会再变化的均值和方差。
从此也可知道,当模型设置在训练状态(model.train() )与推理状态(model.eval() )时,BN层的操作输出是会不一样的。
方法原型如下:
torch.nn.BatchNorm2d(num_features, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True, device=None, dtype=None)
- num_features – 输入的通道数,该参数将决定BN层有多少个γ和β
- eps – 分母增加的一个小数,防止除以0,默认值为1e-5
- momentum – 指数滑动平均的动量值,Default: 0.1
- affine – 是否执行乘以γ、加β的操作,要理解为什么叫affine需要去看论文。Default: True
- track_running_stats – 是否需要执行记录统计均值、统计方差。默认是开启的,如果不开启,则计算时的均值方差只来自当前batch的计算值。 Default: True
具体使用方法详细可见配套代码,请尝试调整各个参数,观察输出的变化以及网络层本身参数的变化。
BN提出之后几乎成了深度学习模型的标配,但在一些任务中BN的均值、方差计算方式就不太适用了,针对均值、方差的统计方式不同,就有了GN、LN、IN。
GN是针对batch size小(一些任务占显存大,只能用小batch跑),统计的均值方差存在较大差异而提出的分组进行统计,详细参见:Group Normalization
LN是针对RNN这样的序列网络设计的,以层为单位进行统计均值、方差,详细参见:Layer Normalization
IN是针对风格迁移这类GAN任务中,不同风格实例的差异较大,以实例为单位进行统计均值、方差,详细参见:Instance Normalization: The Missing Ingredient for Fast Stylization
LRN是2012年深度学习图像领域开山之作——AlexNet中采用的正则化方法,现在很少采用,详细参见:ImageNet Classifification with Deep Convolutional Neural Networks
Dropout Layers
Dropout——随机失活和LRN一样在Alexnet论文中所采用,以防止模型过拟合,针对它的正则化作用探讨可参见由Hinton一作发表的论文Improving neural networks by preventing co-adaptation of feature detectors。
Dropout 的操作非常简单,以概率p随机的让部分神经元暂时失活,失活表示它不与任何神经元连接,如下图所示: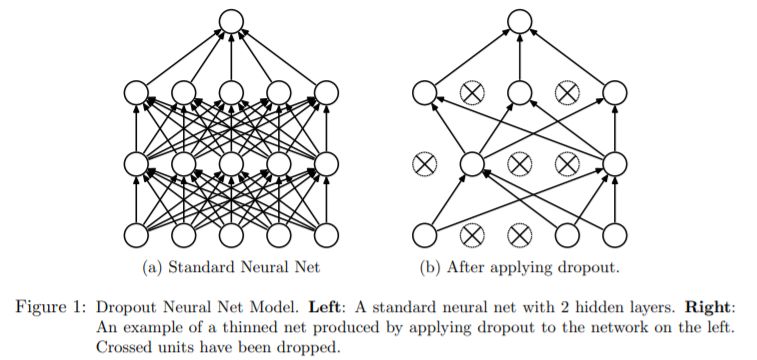
图片出自:《Dropout: A Simple Way to Prevent Neural Networks from Overfitting》
训练过程的每一次forward,都会重新进行随机失活。在测试(推理)过程,所有神经元都参与工作,不再采用随机失活。更详细的操作及理论分析,推荐阅读《Dropout: A Simple Way to Prevent Neural Networks from Overfitting》。
Dropout使用注意事项:
- Dropout通常用于nn.Linear层之前
- Dropout执行后,神经元个数会减少,导致数据尺度发生变化
论文中给出的方法是在测试时,需要将神经元数据尺度缩放 1/p倍,因为在训练时候减少了p倍。(p为随机失活的概率)。但在工程应用的时候,最好是减少推理的步骤,于是pytorch把数据尺度的缩放弄到了训练中,在训练时,对数据进行1/(1-p)的放大。(Furthermore, the outputs are scaled by a factor of 1/(1-p) during training. )
关于数据尺度缩放,这里设计了验证实验,可到配套代码中运行并查看。
Alpha Dropout
Dropout的随机失活会导致数据分布的变化,而数据分布对于模型训练的稳定是非常关键的,因此有针对这个问题提出了一种保持输入均值和方差不变的Dropout——Alpha Dropout。理论分析建议阅读论文Self-Normalization Neural Networks
FeatureAlphaDropout是基于通道维度进行的,并且不同于Dropout的置零,它是将神经元设置为SELU激活函数的负饱和值,通常 Alpha Dropout都是搭配SELU激活函数的,具体推导还是要看论文Self-Normalization Neural Networks,一篇102页的论文。
Non-linear Layers
非线性激活函数是深度学习的命根子,倘若没有非线性变换函数,那么1亿层的Linear层堆叠,也只能等价于1层网络(通过矩阵乘法法则可推导)。因此非线性激活函数是深度学习之所以能称之为深度的重要因素。
对于非线性激活函数,pytorch划分为了两大类,这是非常合理的!分别是Non-linear Activations (weighted sum, nonlinearity) 和Non-linear Activations (other)。
其实可以作用进行划分
- 为了对神经元进行非线性变换的称为非线性激活函数
- 为了对输出神经元进行Softmax的、变为概率分布形式的称为特殊非线性激活函数
更通俗的划分是:
- 非softmx的;
- softmax系列;
对于非softmax,大家肯定不陌生,如sigmoid、tanh、ReLU、PReLU等,这些就不过多介绍,请大家自行查阅文档
对于softmax需要简单讲一讲,softmax的作用是将一个向量转换为一个概率分布的形式,以便于实现loss的计算,计算过程如下图所示:
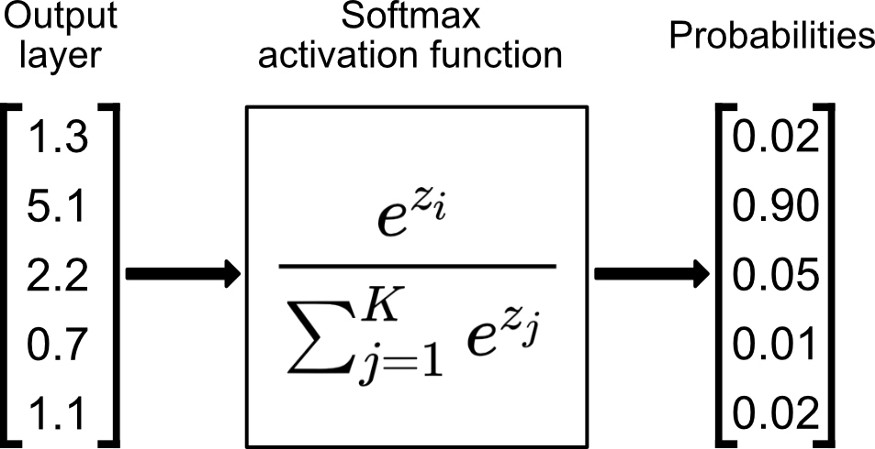
计算公式如下:
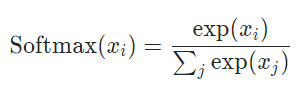
看着一头雾水,其实很好理解。一个概率向量它的要求至少有这两个
- 非负
- 求和等于1
对于非负,用上幂函数,就可以实现了;
对于求和对于1,那就所有元素除以一个求和项,所有元素再加起来的时候分子就等于分母,自然求和等于1了,Softmax的设计思路真巧妙!
对于Softmax系列的激活函数,可参考文档
小结
本文对pytorch常用的网络层接口进行了介绍与代码分析,由于深度学习模型发展迅速,难以详尽介绍每一个网络层的使用,但pytorch都有详细的文档可以学习,希望大家可以通过本节内容学习如何学习pytorch的系列函数、类方法使用。
本小节配套代码中有这些网络层的演示:
更多更详细的网络层使用介绍,可查看文档中的目录,这里简介每个主题的内容
- Containers: 模型容器
- Convolution Layers:卷积层
- Pooling layers:池化层
- Padding Layers:填充层
- Non-linear Activations (weighted sum, nonlinearity):非线性激活函数
- Non-linear Activations (other):Softmax系列激活函数
- Normalization Layers:标准化层
- Recurrent Layers:RNN 网络层
- Transformer Layers: Transformer 网络层
- Linear Layers:线性层
- Dropout Layers: 随机失活层
- Sparse Layers:稀疏网络层
- Distance Functions:计算距离函数
- Loss Functions:计算损失函数
- Vision Layers:CV任务网络层
- Shuffle Layers:随机打乱功能层
- DataParallel Layers (multi-GPU, distributed):多GPU网络层,多gpu需要用层的概念进行包装
- Utilities:各功能函数层
- Quantized Functions:量化功能函数
- Lazy Modules Initialization:“懒惰”初始化功能模块
到这里,Module的类型就介绍完毕,下一小节将学习Module内部有哪些api,如何使用它们对一个Module进行管理,如模型的网络层查看、管理,模型的参数查看、管理,以及Hook函数的用法。