8.3 目标检测——无人机检测
前言
目标检测在工业界应用广泛,例如工业生产线上的质量检测、监控工业场景中的安全问题、机器人的自主导航等,可以提高生产效率和产品质量,降低生产成本,也可以提高工作环境的安全性,减少事故发生,由此可见目标检测意义重大。
本小节,将介绍工业界中的热宠YOLOv5,并通过无人机场景检测任务进行实现。
本小节内容丰富,包括:
VisDrone数据集介绍
目标检测常见数据格式介绍:VoC, COCO, YOLO
YOLOv1-YOLOv8 概述:了解YOLO发展历史,各版本模型优点,缺点
YOLOv5 源代码结构剖析及使用步骤:了解优秀的项目代码结构,设计
YOLOv5在VisDrone数据集上的多组实验,了解不同容量的YOLOv5能力
数据模块
VisDrone数据集介绍
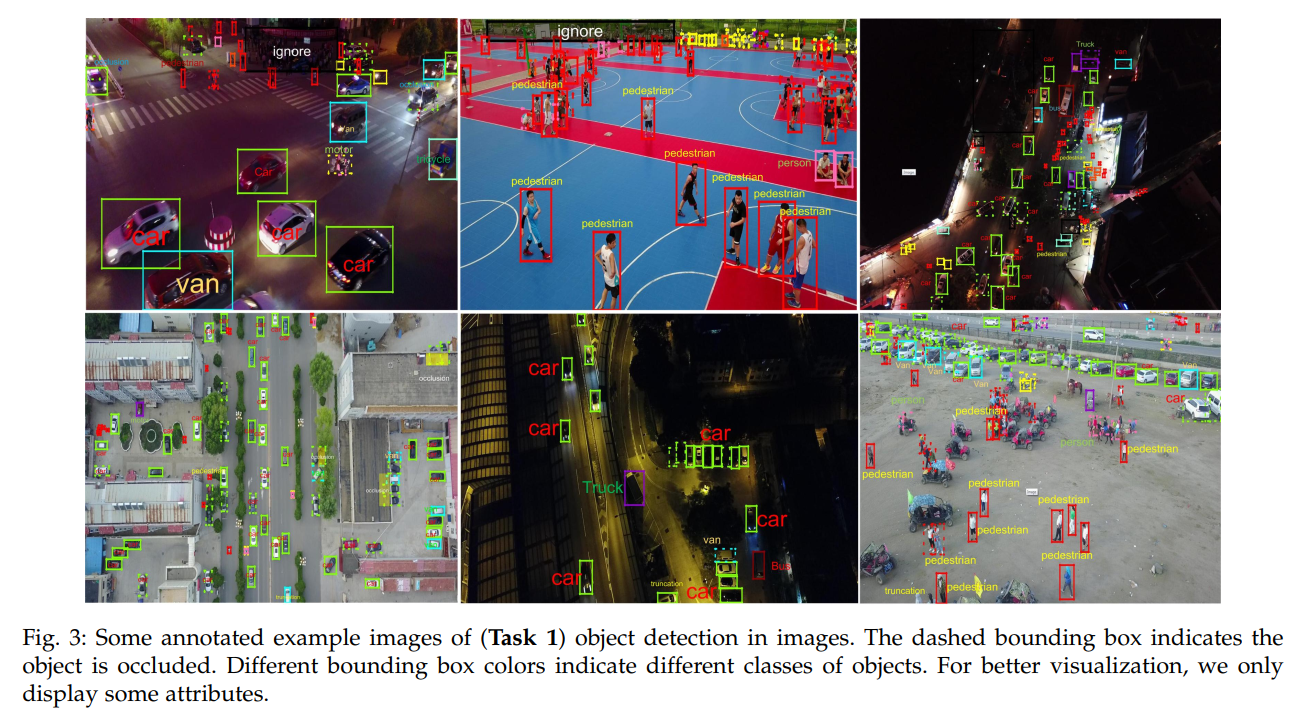
VisDrone数据集是一个大规模的用于视觉目标检测、跟踪和计数等任务的数据集,由天津大学整理于2018年发布,论文为Vision Meets Drones: A Challenge,可通过github下载。
其中包含多个任务,这里采用VisDrone-DET数据集,进行目标检测案例学习,VisDrone-DET也就是VisDrone2018。
VisDrone-DET中,总共包含10209张,划分为了4个数据集,额外给出了一个1610张模拟的测试集-dev,训练集6471张,验证集548张,测试集-dev1610张,测试集-challenge 1580张。
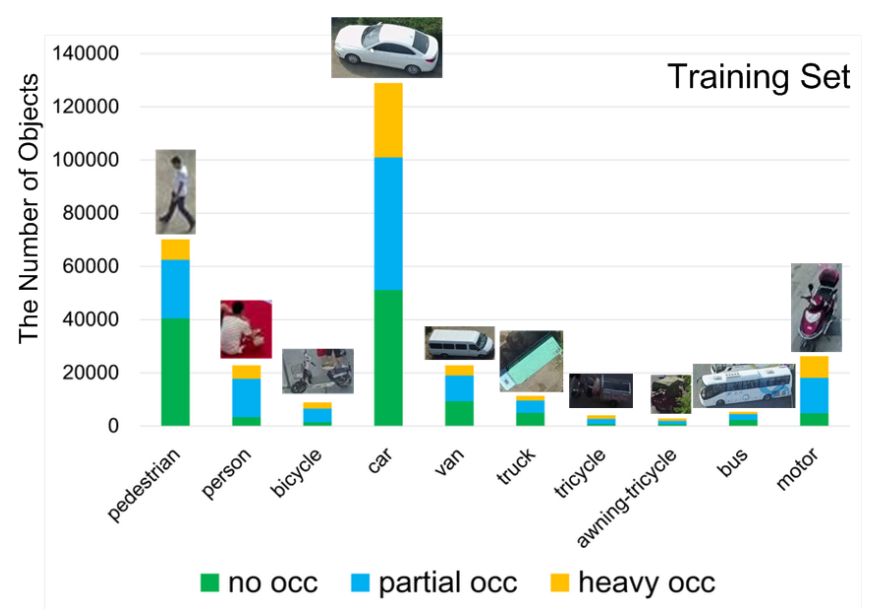
数据特点:图片分辨率较大、目标小、目标存在一定程度遮挡,部分是严重遮挡(例如汽车)。
下面介绍数据集目录组织形式与标签含义。
数据包含annotations和images两个文件夹,分别存储标注信息txt文件,图片jpg文件,文件名保持一致。
标签txt文件中,一行表示一个标注框,一行有8个信息,例如
495,473,120,46,1,4,0,1
507,447,107,38,1,4,0,1
分别表示:
<bbox_left>,<bbox_top>,<bbox_width>,<bbox_height>,<score>,<object_category>,<truncation>,<occlusion>
- bbox:前四个为bbox信息;
- score:表示标注框的置信度,取值为0或1,0表示忽略,1表示可用。
- object_category: 目标类别,0-11,分别是,gnored regions(0), pedestrian(1), people(2), bicycle(3), car(4), van(5), truck(6), tricycle(7), awning-tricycle(8), bus(9), motor(10), others(11)
- truncation:截断程度,取值为0,1。0表示无截断,1表示目标有1%~50%的区域再当前帧(图像)之外。
- occlusion:遮挡程度,0-2。0表示无遮挡,1表示1%-50%遮挡,2表示50%-100%遮挡。
对于本案例使用,仅需要剔除score=0的bbox。
目标检测数据集格式
了解数据之后,需要把数据集转换为代码可以接收的形式。与分类分割任务不同,目标检测领域的数据格式相对固定,一般不需要自己重写数据加载模块,而是跟随代码框架的要求来适配。
目标检测目前主流的有三种格式,VOC格式、COCO格式、YOLO格式,下面分别介绍。
VOC数据集格式如下:
图像位于JPEGImages文件夹。
标注文件位于Annotations文件夹中,标注文件与图像文件文件名应当相同,并且XML格式描述目标的位置和类别等信息,bbox形式为xmin、xmax、ymin、ymax。
COCO数据集格式如下:
图像位于images文件夹中。
标注文件位于annotations文件夹下的instances_train2017.json,所有标注均存储在一个json中,并通过特定字段获取图片对应的标签信息。bbox形式为xmin, ymin, w, h。
YOLO数据格式如下:
图像位于images文件夹下。
标注文件位于labels文件夹下,标注文件与图像文件文件名应当相同,并且以txt文件存储标签信息。txt中一行是一个标注框,一行的格式为:
class x_center y_center width height,其中bbox的数值需要除以长/宽,使得值为0-1之间。
在这里侧面证明了YOLO模型的强大,以往算法开发要适应数据集的格式,而现在yolo系列模型被广泛使用,使得大家愿意接受YOLO数据格式。
标签数据转换代码
在目标检测任务开发过程中,无法避免数据集之间的转换,这里推荐repo,可以实现三种数据格式之间的互相转换。
在本案例中,适合自行编写脚本进行转换,这里yolov5官方也给出了代码,因此直接复用即可。
推荐yolov5中使用的几个小函数:
- 文件夹的创建, Path对象可直接.mkdir(),并且可设置递归及判断存在与否。
from pathlib import Path
(dir / 'labels').mkdir(parents=True, exist_ok=True) # make labels directory
pbar显示进度, 将可迭代对象用tqdm包一下,并且设置打印的字符串信息格式desc
pbar = tqdm((dir / 'annotations').glob('*.txt'), desc=f'Converting {dir}')
使用配套代码,运行即可得到与images文件夹在同级目录下的labels文件夹
python visdrone2yolo.py --data-path /mnt/chapter-8/data/visdrone
到这里yolo格式数据集已经准备好,如何在代码中使用及配置,这部分放到模型模块中的yolo框架讲解部分。
模型模块
在数据模块,讲解了目标检测中数据集常见的格式,并且已经转换称为yolo格式,等待使用。
若是在分类或分割中,我们会手写代码进行实验,然而在目标检测,绝大多数是不需要的,原因有
- 目标检测中涉及多个模块,重新造轮子的时间成本高,容易出bug;
- 目标检测可用成熟的“框架”(可用的repo)很多,如ultralytics的yolov3/yolov5/yolov8,mmdetection,paddledetction等,感谢前人的工作!
- 成熟的"框架"指,功能齐全,满足绝大多数场景,受众多,经得起时间的考验,可以放心使用。
在图像分割的实验中就指出,凡是有系列的,优先考虑,因此,这里选择ultralytics的yolov5,它是目前为止(2023年3月10日07:07:25)star最高的目标检测开源代码仓库,已经36K,足以证明yolov5的稳定性与可靠性。
yolo系列简介
| YOLOv1 | YOLOv2 | YOLOv3 | YOLOv4 | YOLOv5 | YOLOv6 | YOLOv7 | YOLOv8 | |
|---|---|---|---|---|---|---|---|---|
| 时间 | 2015.6.8 | 2016.12.25 | 2018.4.8 | 2020.4.23 | 2020.6.10 | 2022.6.23 | 2022.7.7 | 2023.1 |
| 作者 | Joseph Redmon | Joseph Redmon | Joseph Redmon | Alexey Bochkovskiy | Ultralytics | 美团 | Alexey Bochkovskiy | Ultralytics |
深度学习目标检测框架发展快10年时间,只有yolo(You Only Look Once)系列久经不衰,截至目前公认的版本已经到了v8,很难有人能将v1-v8的细节全部吃透。
在校有时间的同学十分建议从v1-v8认真学习,这样可以理解目标检测的发展,锻炼科研意识,掌握代码能力。
对于工作繁忙的工程师来说,它们只是解决问题的工具,了解工具的优点与缺点,有的放矢的应用在各个项目场景也是不错的选择。
为此,特地总结yolov1-v8的特点,为后续使用工具打下基础。
参考deephub的文章,可以看到yolo系列主流的模型发展历程。
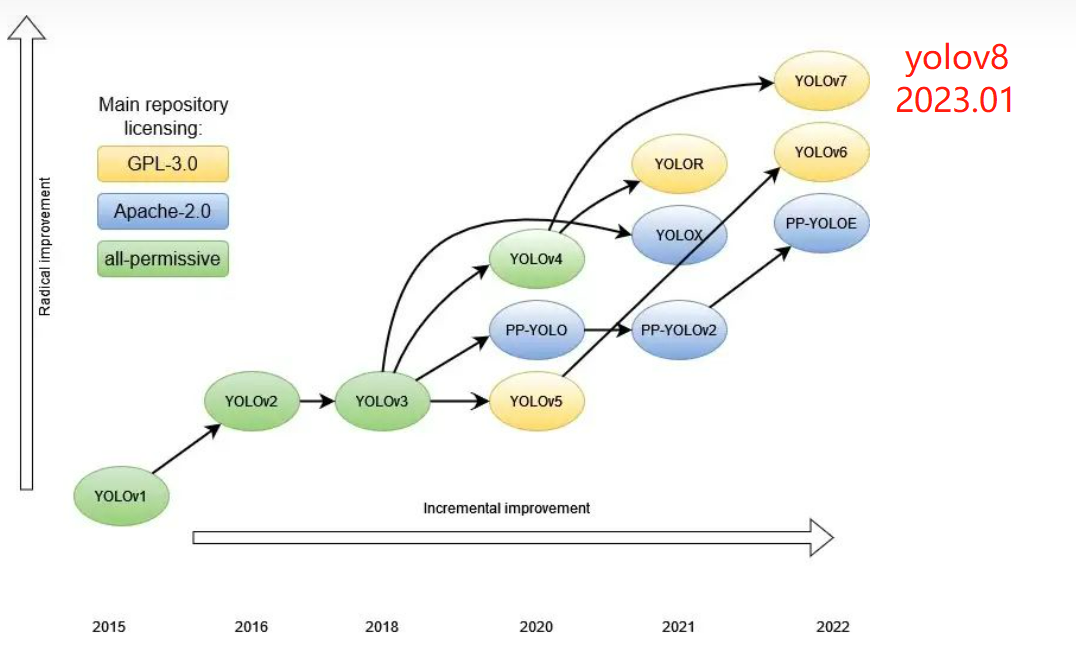
yolov1:2015年提出的one-stage目标检测算法,与当时的Fater RCNN(two-stage)共同称为当时最受欢迎的检测模型。特点为anchor-free:没有anchor的概念,每个cell直接输出bbox。每个cell仅输出2个bbox,每个cell输出向量为(20+ (4+1)*2),20为20个类,1为bbox概率,4为bbox信息,一张图片最终变为7×7的特征图,一个cell只能预测1个类,因此定位粗糙,小目标不友好,对重叠物体检测能力差。
yolov2:针对yolov1定位不精准问题,借鉴faster rcnn的anchor-base的概念,并且引入k-means实现anchor的自动配置。
yolov3:划时代意义的目标检测算法,也奠定了目标检测之后的范式,backone+neck+多尺度。yolov3网路结构简单,并且采用多尺度特征图实现不同尺寸目标的检测,速度与精度在当时都是优于其他模型。yolov3采用的是手动配置的33=9种anchor,anchor的参数设置是通过k-means对标签进行聚类发现的,*3种尺寸,3种长宽比。
yolov4:yolov4发布前有个小插曲,那就是YOLO之父Jeseph Redmon,由于“无法忽视工作带来的负面影响”,公开宣布隐退。好在有大神接了他的大旗,在yolov3推出快2年的时间,yolov3的改进版v4终于在2020年来了,yolov4开始,可以认为是一个分割点,更准确地说yolov3是后续模型的分割点。借助paperswithcode的一个精度图,可以看到yolov3在coco的map是30-40之间,而往后v4-v8已经来到50-60的区间,已经不在一个档次。
对于yolov4,它对当时深度学习的多种tricks进行了实验,集成到yolov3上进行改进,精度和速度都得到大幅度提升。它使用了大量tricks,包括WRC、CSP、CmBN、SAT、 Mish activation、Mosaic data augmentation、CutMix、CmBN、DropBlock regularization 和 CIoU loss、GIoU loss。
yolov5:在yolov4发布后短短2个月,yolov5横空出世,并且带来了多种大小的模型, nano/s/m/l/x等尺寸,可适用于多种场景,同时配备高质量的开源代码仓库,短时间内就受到了广泛关注。yolov5数据增强上使用了Mosaic数据增强、自适应锚框计算、自适应图片缩放(推理时采用最小填充原则,加速推理)、融合新网络模块Focus、CSP结、FPN+PAN,GIOU_Loss,以及预测框筛选的DIOU_nms、
yolov6:2022年由美团提出的速度更快的检测模型,主打是速度,因此模型特点是backbone与neck的设计都为了适应硬件的运算,使用了Rep-Pan和EfficientRep块,head部分用了解耦的形式,在训练策略方面采用了anchor-free、SimOTA标记策略、SIoU盒回归的损失。
yolov7:在yolov6推出不到半个月,yolov7也发布了,yolov7团队与yolov4团队一致,属于官方YOLO团队(yolov4团队接过yolo之父Jeseph Redmon的大旗)。yolov7同样从速度方面做了许多优化,例如内存访问成本、I / O比率、element-wise、激活函数等,以及模型重参数化(re-parameterization)。
yolov8:yolov5的团队——ultralytics打造的集成图像分类、图像分割、目标检测于一体的结构,目前github地址并为采用yolov8而是采用ultralytics。发布2个多月后,论文仍旧未发布,具体优化内容请关注官方github,从代码中观察吧。
yolov5 代码结构讲解
根据广大工程师“用脚投票”的结果,本案例采用ultralytics的yolov5来实现目标检测,并学习代码中优秀的设计思想,同时剖析用户如何使用yolov5仓库代码。
后续建议跟进yolov8!
学习yolov5之前,推荐阅读yolov5的readme,其中包含了许多学习资料。
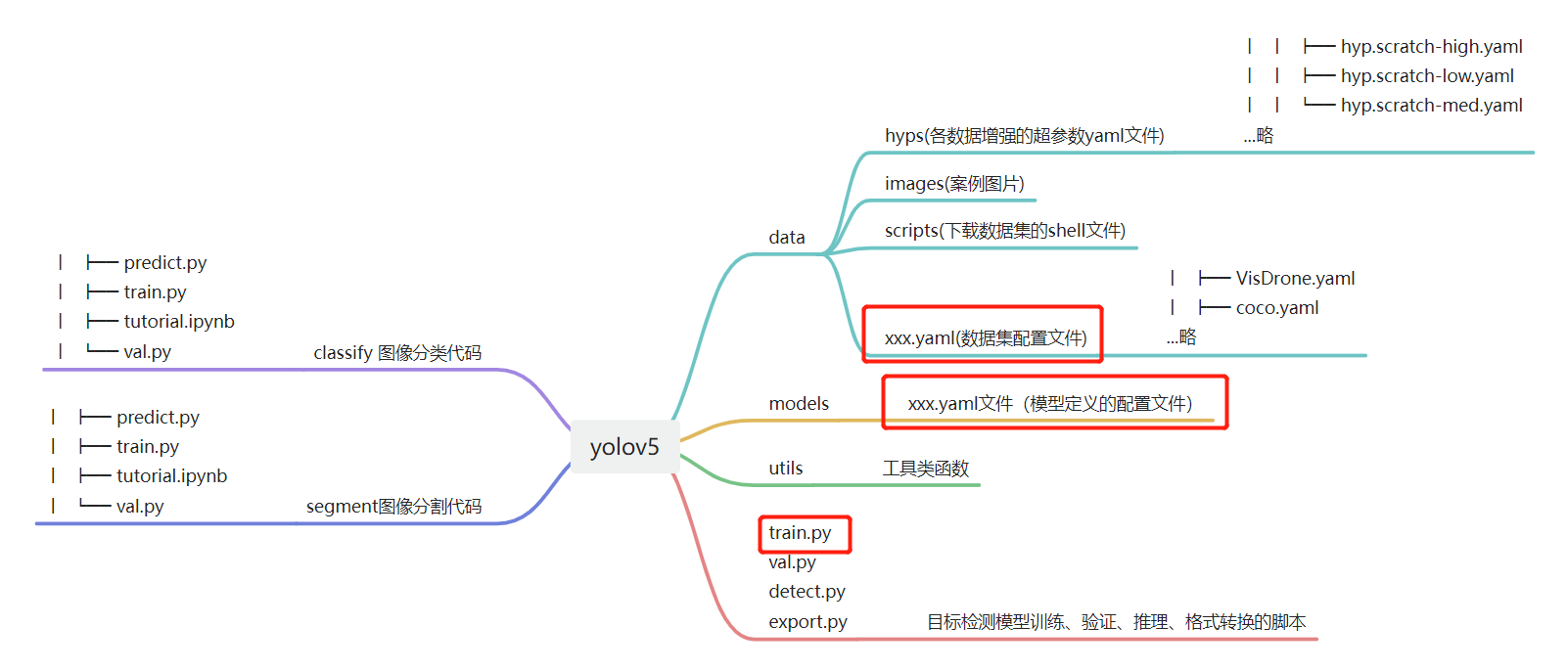
下图为yolov5(2023.03版)的代码结构,逻辑相当清晰,可分三个模块,三个模块是图像分类、图像分割和目标检测。
目标检测分为data、models、utils和运行脚本部分。
- data:存放的主要是数据超参数配置yaml文件。
- models:存放的是各模型的yaml配置文件,即模型创建依赖于yaml文件。
- utils:存放各功能模块,如,数据增强augmentations.py, 自动计算anchor功能autoanchor.py,激活函数activations.py, fastapi接口等等。
检测模型的训练、验证、推理分别在:train.py, val.py, detect.py中。下面将重点讲解train.py的运行机制。
yolov5 训练机制讲解
train.py有600多行,并且调用了许多函数,一开始接触会感到困难。
不过不用担心,它还是pytorch框架,仍旧逃离不了基础核心模块, dataloader, module,loss, scheduler,迭代训练。
下面依次简要的说明train.py中是如何训练的。
参数配置模块
使用parse_opt()进行参数包装,训练时可指定模型、数据集配置yaml路径,超参数配置yaml路径等内容。
数据模块
man() --> train()-->create_dataloader(): 第188行,调用了create_dataloader()函数,并且传入了数据集配置yaml文件中的训练集路径。
utils/dataloders.py-->LoadImagesAndLabels(): 在函数内部采用LoadImagesAndLabels()类实现pytorch的dataset的生成,class LoadImagesAndLabels(Dataset), 代码有483行,里面实现了许多数据检测、数据加载功能,但是核心与pytorch的dataset是一致的,重点关注init中做了哪些初始化,以及getitem如何从磁盘加载图片并且做数据预处理、数据增强的即可。
模型模块
第125行实现模型创建,可以看到是通过配置信息进行创建的,这里的配置信息来自参数配置模块中--cfg或者指定预训练模型--weights,
model = Model(cfg or ckpt['model'].yaml, ch=3, nc=nc, anchors=hyp.get('anchors')).to(device) # create
再看往里看 DetectionModel继承自BaseModel,BaseModel集成nn.Module,里边细节就可通过nn.Module的基础知识一步一步剖析。
迭代训练模块
核心功能在,262行
262行:主循环
for epoch in range(start_epoch, epochs): # epoch ------------------------------------------------------------------
284行:batch循环
for i, (imgs, targets, paths, _) in pbar: # batch -------------------------------------------------------------
310行:前向推理,计算loss,反向传播
pred = model(imgs) # forward
loss, loss_items = compute_loss(pred, targets.to(device)) # loss scaled by batch_size
scaler.scale(loss).backward()
344行:epoch维度变更学习率,因此在batch的循环之外
lr = [x['lr'] for x in optimizer.param_groups] # for loggers
scheduler.step()
日志输出模块
在runs文件夹下会有train文件夹,每一次实验会以exp{实验次序}创建文件夹,在下面会保存训练过程中的一系列有价值内容。
如下图所示,会有这些文件
weights:训练好的模型权重,包括last.pt, best.pt
hyp.yaml:训练时的超参数,便于复现
results.png:训练曲线,便于分析训练情况,调整超参数
results.csv:训练指标记录表格
train_batch2.jpg:训练数据集,bbox绘制情况,十分有用,可用于检测数据标签是否处理正确!
val_batch0_labels.jpg:验证数据集,bbox验证情况
val_batch2_pred.jpg:模型预测出的bbox在验证集上的情况。
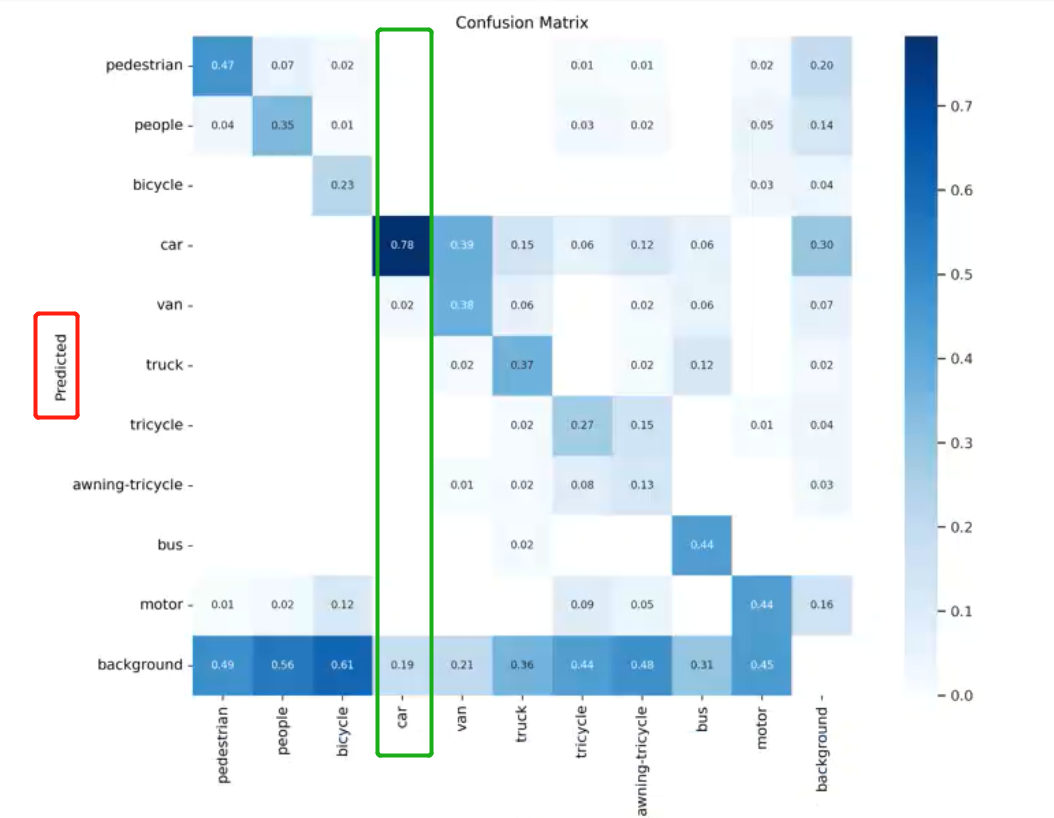
混淆矩阵:针对标签的预测的情况进行混淆矩阵观察,这个混淆矩阵是转置了的,行是预测,列才是真实标签,以下图为例,汽车这个类别中,有78%的汽车框被预测为了汽车,有19%的汽车框没有被检测到,剩下2%的汽车框被检测出来了,但是分类时分为了van(箱式货柜车)。
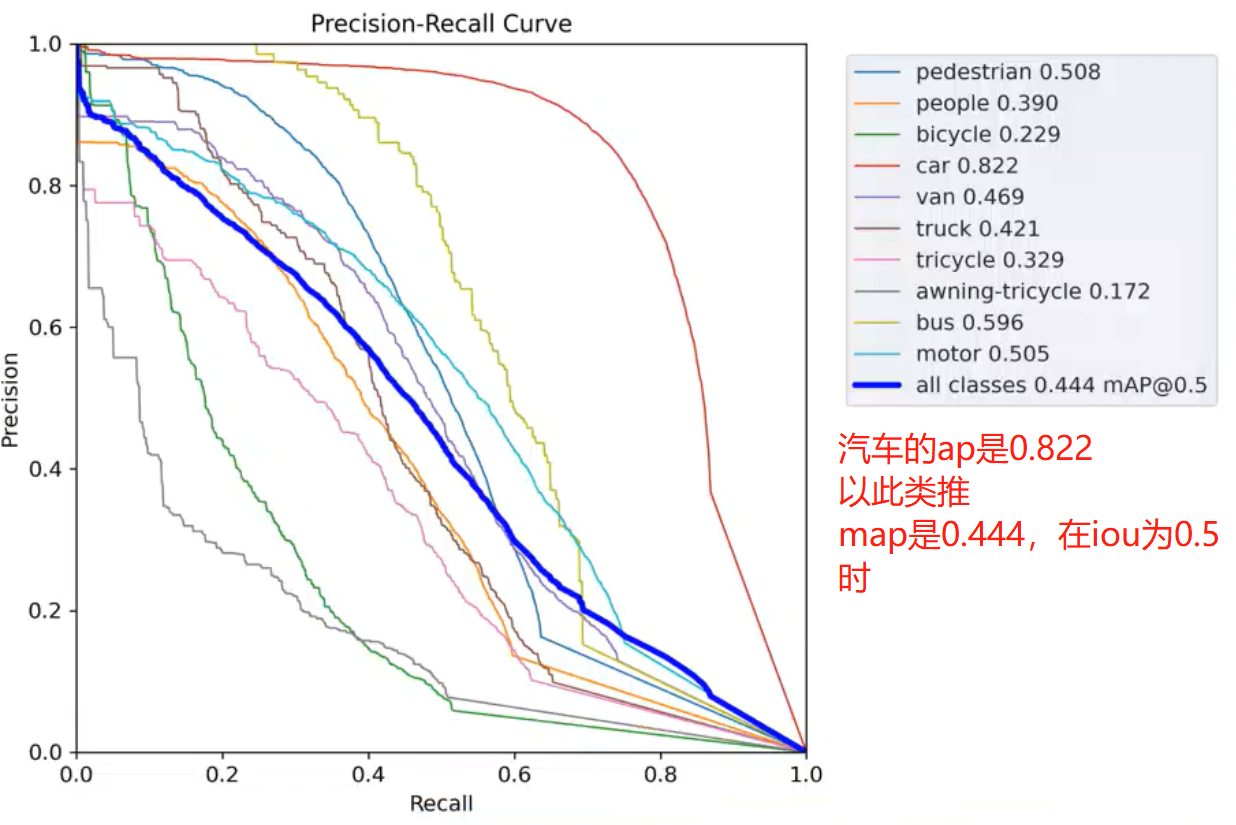
PR_curve:PR曲线是各类别的AP情况
P_curve和R_curve:是观察模型对各类别分类情况,可用于挑选分类概率阈值, 横轴表示选择的阈值,纵轴是对应的值。可以看到阈值越小召回率越高,反之,精确度越低。
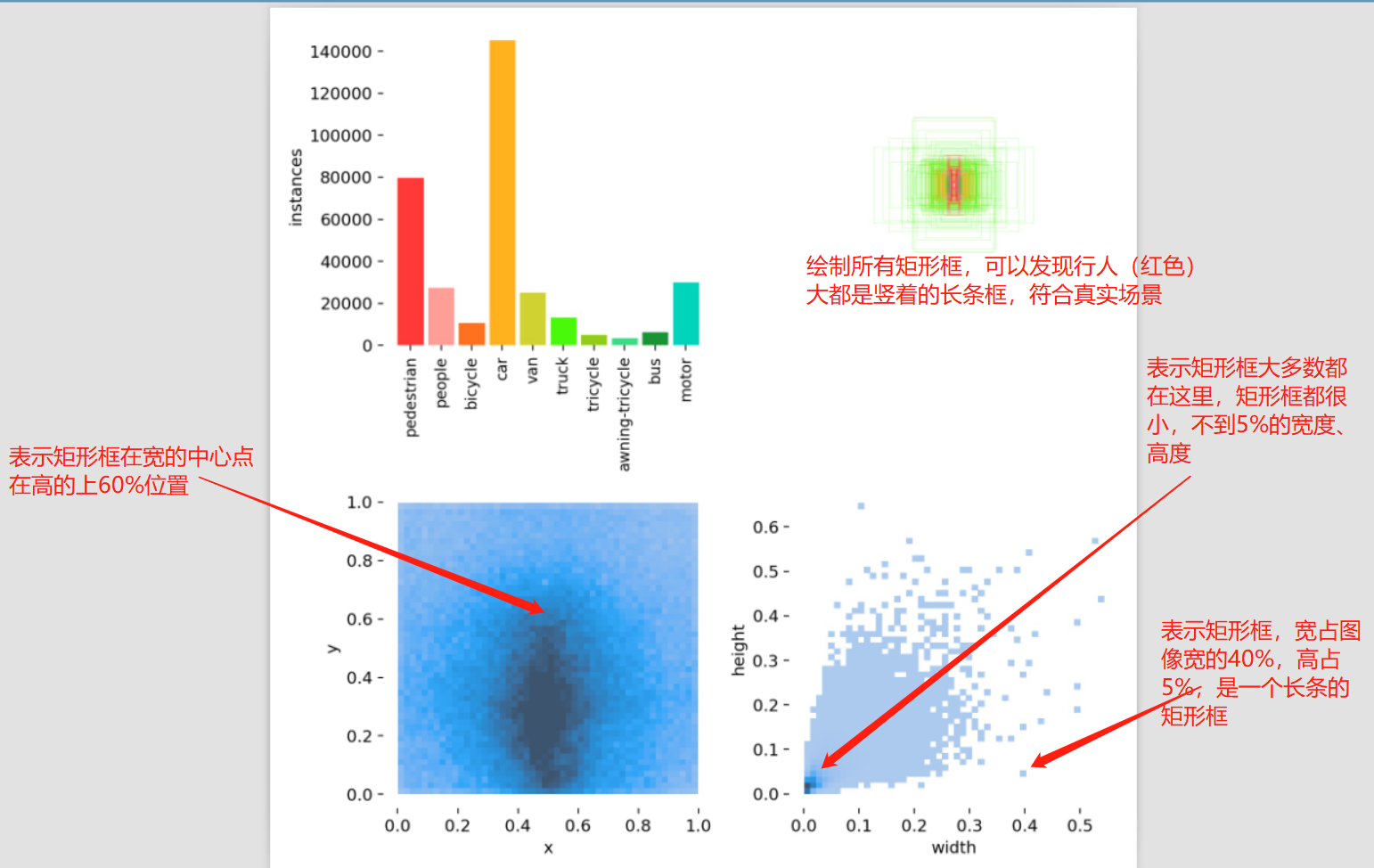
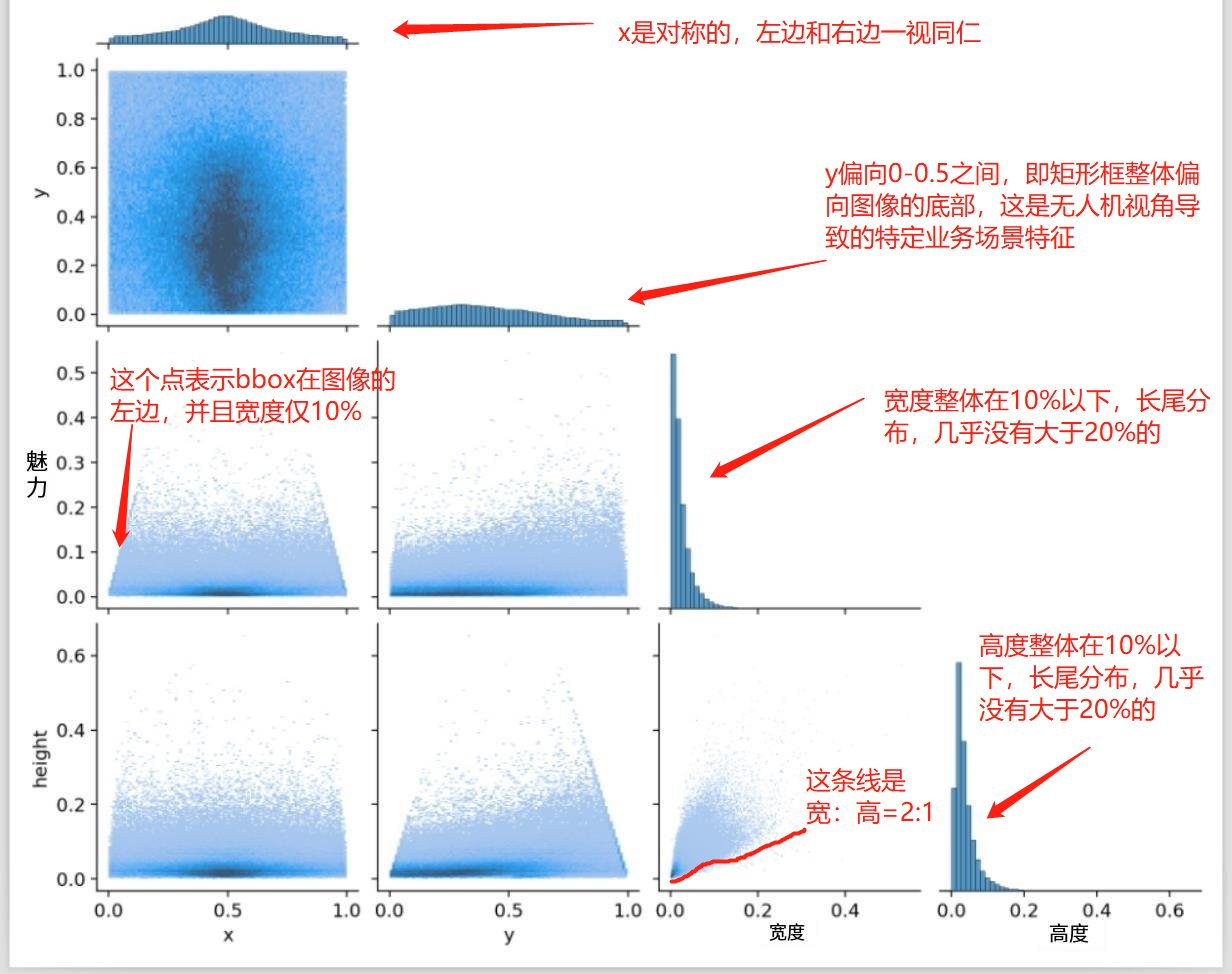
labels_correlogram.jpg:是借助seaborn的pairplot,绘制的多变量的二维分析相关性统计分析图。以列为基础,第一列是x与其它数据的关系,第一列,第一行,表示x的整体分布,可以看到是相对于中心点0.5对称的,表明矩形框在宽这个维度,左边有的数量与右边有的数量是一致的,并且呈现中间多,两边少的情况。
第一列,第二行,表示x与y的分布情况,同labels.jpg中第三幅图一样,观察矩形框整体情况是宽度偏中间,高度偏中间与中下部。
第一列,第三行,表示x与w的分布情况,呈现一个梯形,这个很合理,因为当x靠近图片的最左边的时候,即物体在图像的边界时,这个物体一般不会很大,否则根据拍照的基础原理,肯定会将镜头朝向主要物体,并放置在镜头中央,不至于在边界处。
第一列,第四行,表示x与h的分布情况。
第二列,第二行,是y的整体分布,可以看到是偏向0-0.5之间。
第三列,第三行,是w的整体分布。
第四列,第四行,是h的整体分布。
yolov5 训练VisDrone步骤
第一步:设置数据集配置yaml文件,首先到detection\yolov5-master\data\下复制一份yaml,命名为mydrone.yaml,设置好路径即可,这里yolo数据格式只需要images路径就能通过相对路径寻找到labels。同时设置好检测类别数量与名称
path: G:\deep_learning_data\VisDrone # dataset root dir
train: VisDrone2019-DET-train\\images # train images (relative to 'path') 128 images
val: VisDrone2019-DET-val\\images # val images (relative to 'path') 128 images
test: # test images (optional)
nc: 10 # number of classes
names: ['pedestrian', 'people', 'bicycle', 'car', 'van', 'truck', 'tricycle', 'awning-tricycle', 'bus', 'motor']
第二步:将预训练模型下载到code/chapter-8/03_detection/yolov5-master下,下载方式为github。
第三步:在终端,运行训练指令,即可在runs/train下面看到对应日志.
python train.py --imgsz 640 --batch 16 --epochs 100 --data mydrone.yaml --weights yolov5s.pt --workers 8
对比实验
实验一:visdrone数据集特点是分辨率大,一般的640,1000的尺寸无法满足要求,为此,进行了5种尺寸的训练,用于观察不同分辨率对精度的影响
实验二:yolov5提供多种尺寸的模型,这里观察s/m/l三种尺寸的模型对精度的影响。
实验三:同时观察yolov5自带的三种不同强度的数据增强带来怎样的精度变化。
更新:所有实验权重、实验文件已经上传云盘:链接:https://pan.baidu.com/s/11kQJcCka2VyR5ToF-N0BOQ 提取码:op4x
实验一/二:不同输入尺寸对模型精度的变化
python train.py --imgsz 640 --batch 24 --epochs 100 --data mydrone.yaml --weights yolov5s.pt --workers 8 --hyp data/hyps/hyp.scratch-low.yaml
python train.py --imgsz 960 --batch 16 --epochs 100 --data mydrone.yaml --weights yolov5s.pt --workers 8 --hyp data/hyps/hyp.scratch-low.yaml
python train.py --imgsz 1280 --batch 12 --epochs 100 --data mydrone.yaml --weights yolov5s.pt --workers 8 --hyp data/hyps/hyp.scratch-low.yaml
python train.py --imgsz 1600 --batch 8 --epochs 100 --data mydrone.yaml --weights yolov5s.pt --workers 8 --hyp data/hyps/hyp.scratch-low.yaml
python train.py --imgsz 1920 --batch 6 --epochs 100 --data mydrone.yaml --weights yolov5s.pt --workers 8 --hyp data/hyps/hyp.scratch-low.yaml
| map50/map50:95 | 640 | 960 | 1280 | 1600 | 1920 | |
|---|---|---|---|---|---|---|
| yolov5s | 0.33/0.18 | 0.44/0.26 | 0.50/0.30 | 0.54/0.33 | 0.55/0.34 | exp0-4 |
| yolov5m | 0.38/0.21 | 0.48/0.30 | 0.53/0.33 | 0.57/0.36 | 0.59/0.38 | exp11-15 |
| yolov5l | 0.40/0.23 | 0.50/0.31 | 0.55/0.35 | 0.57/0.37 | 0.60/0.39 | exp16-20 |
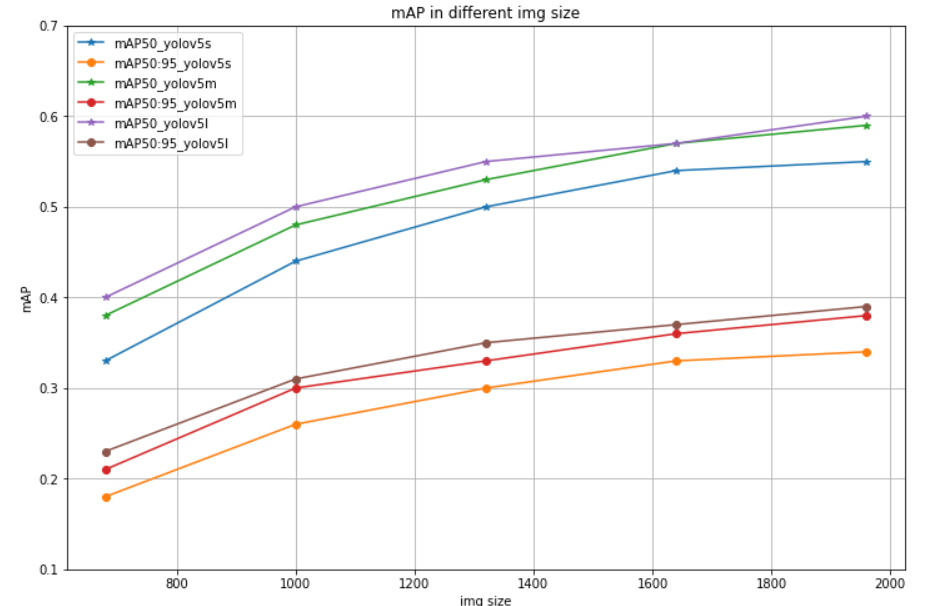
从上图可以看出:
- 随着尺寸增大,精度得到提高,且1920仍未达到瓶颈,可继续增加图片尺寸来获得精度提高。
- 随着模型容量增大,精度得到提高;可根据任务难以程度选择合适容量的模型。
- 在size和模型容量两者间可以选择更适合的方式来涨点,即size也可以涨点,换大模型也可以涨点,如果不能同时采用,则根据上下游条件进行取舍。
实验三:不同数据增强方法的变化
这里套用yolov5提供的三种强度的数据增强方法,观察精度变化。
python train.py --imgsz 960 --batch 16 --epochs 100 --data mydrone.yaml --weights yolov5s.pt --workers 8 --hyp data/hyps/hyp.scratch-low.yaml
python train.py --imgsz 960 --batch 16 --epochs 100 --data mydrone.yaml --weights yolov5s.pt --workers 8 --hyp data/hyps/hyp.scratch-med.yaml
python train.py --imgsz 960 --batch 16 --epochs 100 --data mydrone.yaml --weights yolov5s.pt --workers 8 --hyp data/hyps/hyp.scratch-high.yaml
| scratch-low | scratch-med | scratch-high | ||
|---|---|---|---|---|
| map50/map50:95 | 0.44/0.26 | 0.44/0.26 | 0.43/0.26 | exp5-7 |
从结果可知,yolov5中自带的low, med, high在本案例中效果都一样,并无差别。
模型推理
训练好模型后,可通过detect.py进行推理并观察结果,detect.py提供了多个参数接口
- weights:训练好的.pt文件,.pt文件中存储了模型结构,因此无需额外指定模型结构的yaml文件
- source:需要检测的数据来源,支持图片、视频、摄像头、网络视频url等
- data:数据集yaml文件,关联检测的类别名称
- imgsz:图像输入大小
- conf-thres:检测框置信度阈值
- iou-thres:非极大值抑制时的iou阈值设置
- half:采用半精度(Float 16)进行推理,可提升推理速度,但有一定精度损失
其它配置参数可看代码注释,这面介绍detect.py中的核心代码结构,观察其是如何实现推理的。
第一部分,数据加载读取,对于数据的加载与读取,采用utils/dataloders.py中实现的3个类来实现包装,并进行迭代。如LoadStreams、LoadScreenshots、LoadImages,对于三个类的实例,在使用时,采用for循环进行依次取出数据
dataset = LoadStreams(source, img_size=imgsz, stride=stride, auto=pt, vid_stride=vid_stride)
dataset = LoadScreenshots(source, img_size=imgsz, stride=stride, auto=pt)
dataset = LoadImages(source, img_size=imgsz, stride=stride, auto=pt, vid_stride=vid_stride)
for path, im, im0s, vid_cap, s in dataset:
第二部分,模型加载,使用models/common.py中的DetectMultiBackend类实现,该类支持多种计算后端如pytorch\onnx\tensorrt\jit\dnn等等。其中,pytorch模型是通过models/experimental.py中的attempt_load()函数实现加载。attempt_load()需要的一个核心参数就是.pt文件路径。然后根据.pt内信息完成模型创建、权重加载等工作。
model = DetectMultiBackend(weights, device=device, dnn=dnn, data=data, fp16=half)
model = attempt_load(weights if isinstance(weights, list) else w, device=device, inplace=True, fuse=fuse)
第三部分,推理与保存,推理主要两个步骤,模型前向传播,经过NMS后得到最终输出矩形框。对于结果可视化,这里采用Annotator类实现绘制,首先将图像传入Annottor,进行实例化,后续通过annotator.box_label()进行bbox与labels的绘制。
pred = model(im, augment=augment, visualize=visualize)
pred = non_max_suppression(pred, conf_thres, iou_thres, classes, agnostic_nms, max_det=max_det)
# ------------------------------------------------------------------------------------------------
annotator = Annotator(im0, line_width=line_thickness, example=str(names))
annotator.box_label(xyxy, label, color=colors(c, True))
运行以下推理指令,即可在.runs/detect/exp*下获得结果,下图为航拍视频推理示例
python detect.py --weights ./runs/train/exp2/best.pt --source G:\DJI_0690.MP4 --data data/mydrone.yaml --imgsz 1280 --half
python detect.py --weights best.pt --source G:\DJI_0690.MP4 --data data/mydrone.yaml --imgsz 1280
到这里,yolov5代码就讲解完毕,yolov5代码库还有许多值得学习的地方,这里由于篇幅关系,作为拓展阅读推荐给大家:
- 模型导出为TFLite, ONNX, CoreML, TensorRT:https://github.com/ultralytics/yolov5/issues/251
- TTA(test time augmentation): https://github.com/ultralytics/yolov5/issues/303
- 模型剪枝:https://github.com/ultralytics/yolov5/issues/304
- yolov5训练技巧总结:https://github.com/ultralytics/yolov5/wiki/Tips-for-Best-Training-Results
- yolov5模型集成:https://github.com/ultralytics/yolov5/issues/318
小结
本案例介绍了yolov5实现无人机视角的目标检测,主要涉及以下知识点:
- Visdrone数据集介绍与标签含义解析,会有模糊程度与遮挡程度的两个额外标注信息。
- 目标检测常见数据形式:voc,coco,yolo形式,三者的bbox形式均不一样,使用时需要注意转换。xmin,ymin,xmax,ymax; xmin, ymin, w, h; x_center, y_center, w, h
- yolov1-v8模型简介:简要介绍v1-v8的模型特点,便于后续有的放矢的选择使用。
- yolov5代码结构介绍:剖析yolov5项目代码结构,并分析如何进行训练、推理。
- 自定义数据集训练过程:详细介绍自己的数据集要如何使用yolov5进行训练的过程,核心在于了解yolov5的数据加载形式与模型加载形式都通过yaml文件进行管理。
- 对比实验:分析分辨率、模型容量、数据增强方法带来的精度变化,对后续重要超参数设置具有指导性意义。
本案例已近万字,可以快速用代码实现目标检测,但是对于目标检测的学习来说,还远不够,案例初衷还是通过具体的项目,来巩固pytorch基础知识。
最后,可以发现,即使是采用yaml来管理数据和模型,在实现的时候还会继承dataset和dataloader,以及nn.Module,由此可见第三章和第四章的概念有多么重要。
对于想要深入了解目标检测的朋友,推荐学习:
- 非深度学习目标检测时期的检测方法;
- faster rcnn + yolov3的详细理论过程与代码实现
- yolov3后时代下的,anchor-free, one-stage的检测模型
- 特定问题目标检测:小目标检测, 旋转目标检测,密集场景目标检测,超大分辨率图像目标检测、遮挡场景目标检测等等