8.4 目标跟踪(上)——DeepSORT原理
前言
目标跟踪技术可以用于人流量计数和车流量计数等,能够帮助人们更好地了解和掌握一个地区的交通状况和人流状况。这些计数功能有以下几个价值和意义:
- 交通规划:通过了解车流量,可以更好地规划交通路线和疏导车流,提高交通效率,减少拥堵,从而减少交通事故的发生。
- 商业决策:通过了解人流量,可以更好地了解商业活动的热点区域,从而制定更加有效的营销策略和经营计划,提高商业效益。
目标跟踪(object tracking)定义是,在视频序列中识别目标并赋予唯一标识,同时跟踪目标在视频序列中的位置。在自动驾驶、监控、人机交互等领域都有应用。
目标跟踪常用的策略是TBD(Tracking-by-Detecton),又称DBT(Detection-Based-Tracking)。即在每一帧进行目标检测,再利用目标检测的结果来进行目标跟踪,这一步称为数据关联(Data Assoiation)。与之相对的,是DFT(Detection-Free Tracking), DFT使用较少。
根据目标的数量,目标跟踪可分为单目标跟踪(Sing-Object Tracking)与多目标跟踪(Multi-Object Tracking),目前MOT研究较多,并且MOT可覆盖SOT。
根据处理时效性,又可分为在线跟踪(Online)与离线跟踪(Offline),离线跟踪是指可以使用后续帧的信息来预测当前帧,在视频分析中可用。在线跟踪是只能采用前序帧信息与当前帧信息,这是目前主流方案。
本案例中的目标跟踪属于多目标跟踪、在线跟踪、TBD。
通过简单定义,可以知道,目标跟踪分两步
- 检测:找出当前帧中的目标,即目标检测
- 关联匹配:将当前目标与历史帧中的目标进行关联与匹配
检测可以采用各类目标检测算法,关联匹配可以采用deepsort算法。
本案例将详细介绍DeepSORT算法原理,并基于yolov5实现车流量统计代码。
DeepSORT算法流程
DeepSORT算法发表于2017年,其是SORT的改进版。SORT(Simple Online and Realtime Tracking)于2016年发表,主要基于卡尔曼滤波和匈牙利算法实现。
DeepSORT算法则是对SORT加入了Deep Association Metric进行特征提取与匹配,是目前精度与速度都不错的跟踪算法。
SORT论文速读:提出了基于卡尔曼滤波和匈牙利算法的目标跟踪策略,同时发现好的目标检测器,可以大幅度提升MOT精度,高达18.9个百分点。SORT实现分为4个步骤,分别对应3.1-3.4,目标检测模型得到目标框;采用卡尔曼滤波进行轨迹框的预测;采用匈牙利算法对目标框与轨迹框进行匹配;最后基于匹配结果,删除旧轨迹框,添加新轨迹框。(论文只有5页,核心内容第三章仅半页纸,但不妨碍它是优秀的工作)
DeepSORT论文速读:基于SORT,DeepSORT最大特点是引入了deep association metric,即采用CNN提取目标框中图像特征,来进行匹配。同时,涉及了级联匹配策略,有了更好的准入、准出机制,对目标的跟踪更精细、合理。
目标跟踪的过程相当复杂,为了能了解全过程,这里通过具体案例,一步一步发现问题,然后学习DeepSORT的解决方案,最后汇总。
为了将复杂的问题描述清楚,有必要对名词进行一些解释。
检测框(dets):由目标检测模型输出的框,包含框的位置信息,物体类别信息,是该物体的概率信息
跟踪框(tracks):跟踪模块认为是有价值的检测框。跟踪框中有两种,一个是正式框,一个是预备框。论文中称为confirmed, unconfirmed, 这里借鉴正式党员、预备党员的叫法,应该好理解一些。
预备框(unconfirmed):潜在的跟踪框,只在算法内部记录,当达到一定条件,转为正式跟踪框,才能被算法输出,在屏幕上绘制出来。
正式框(confirmed):目标跟踪算法的输出,回顾定义,目标跟踪需要在视频序列中识别目标并赋予唯一标识,即输出框应当包含检测框信息、唯一标识。
假设世界上没有目标跟踪算法,需要我们自己构思,需求是在在连续帧中将检测到的物体关联起来,实现目标跟踪。
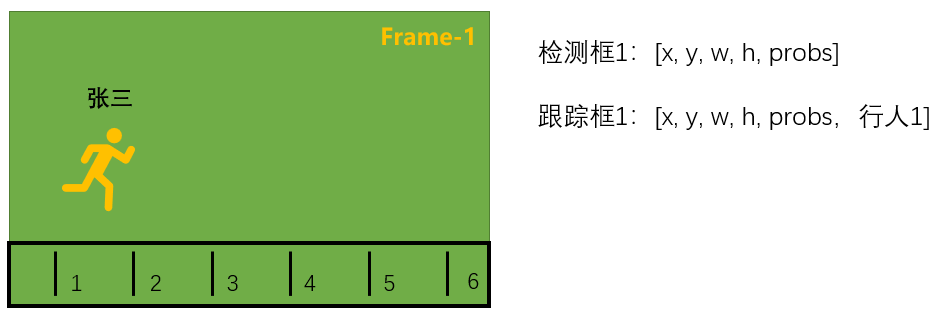
现在有个行人跟踪任务,如图所示
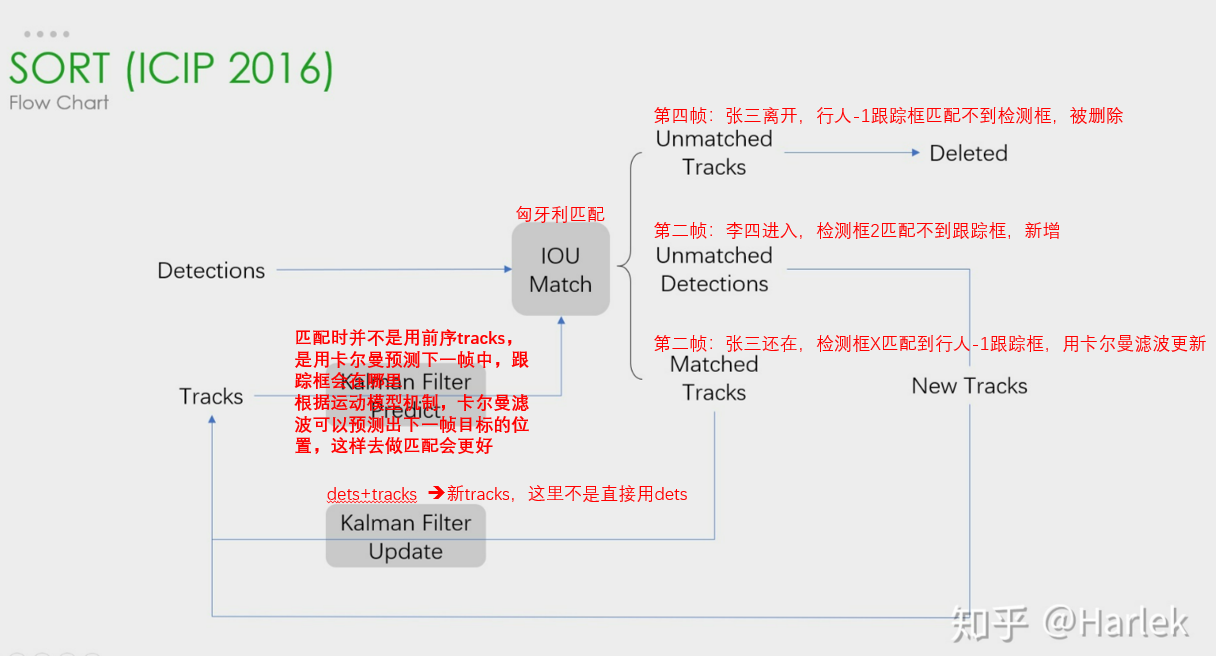
第一帧:检测器只有一个检测框,因此赋予它唯一标识,再采用卡尔曼滤波算法进行跟踪框坐标的输出。
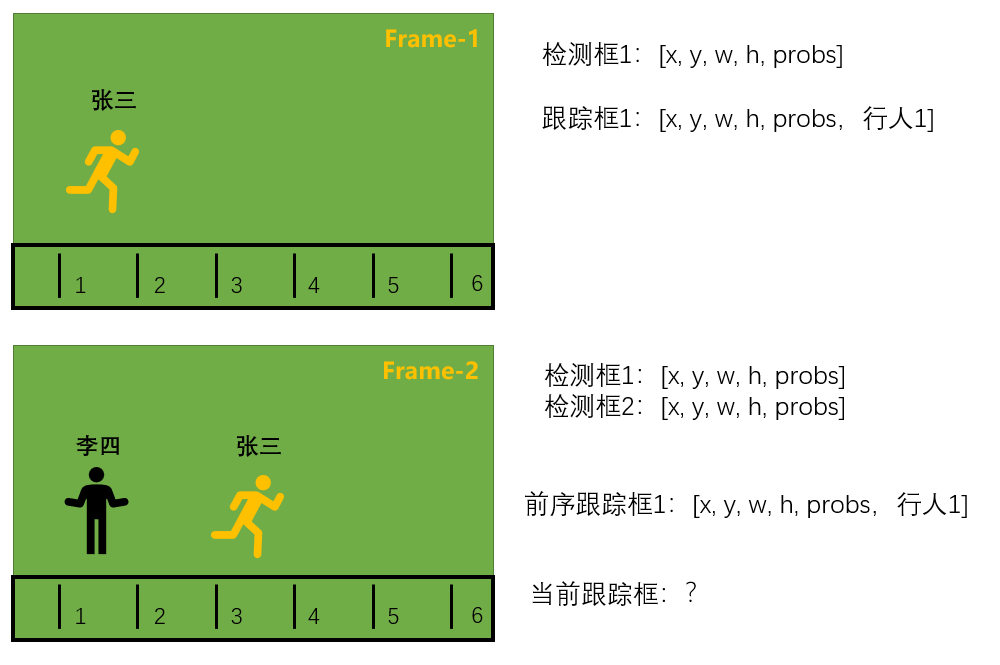
第二帧:检测器输出两个框,如何将2个检测框与1个跟踪框进行匹配,获得行人1在第二帧当中的跟踪框。这时可以借助匈牙利算法,它是求解任务分配问题的组合优化算法。
匈牙利算法可以很好的将检测框1与前序跟踪框1匹配上,然后对前序跟踪框1进行更新(采用卡尔曼滤波),获得当前跟踪框1。
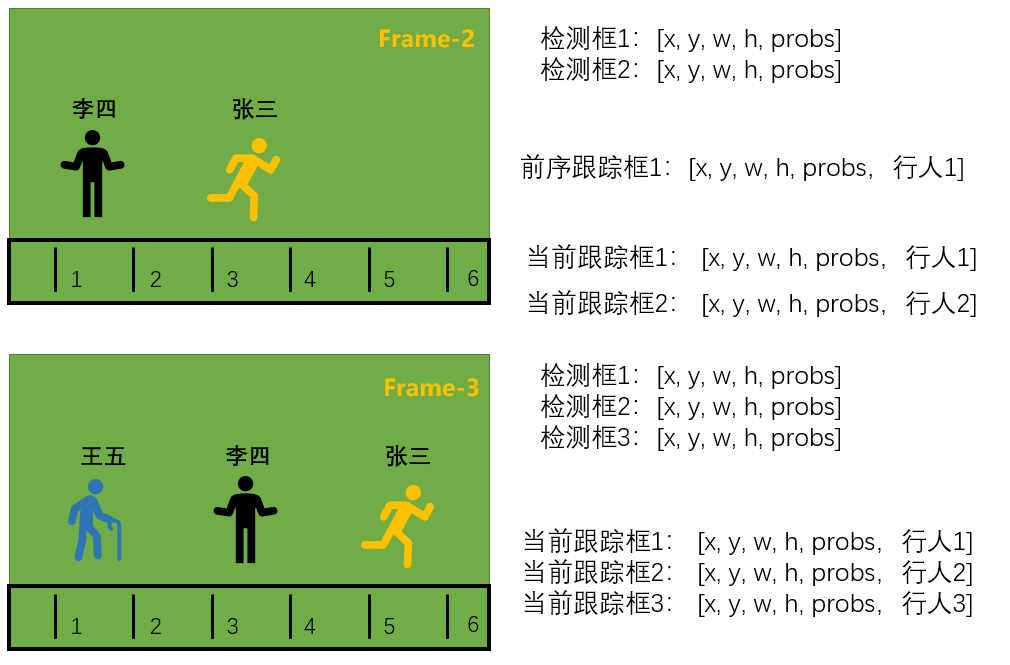
对于检测框2,没有找到与其匹配的前序跟踪框,所以认为它是新进入的,给它创建一个新跟踪框即可。因此,当前跟踪框应有两个。
第三帧:又来了一个人,检测到了3个框,因此重复第二帧的任务,采用检测框更新采用卡尔曼滤波)跟踪框的信息,同时为王五注册新的身份ID——行人3。
第四帧:张三离开了图像,检测器只检测到2个框,2个检测框去匹配3个跟踪框,自然会有一个跟踪框匹配不上,这里显然是行人1,因此没有匹配上的跟踪框需要被删除,最终输出两个跟踪框。
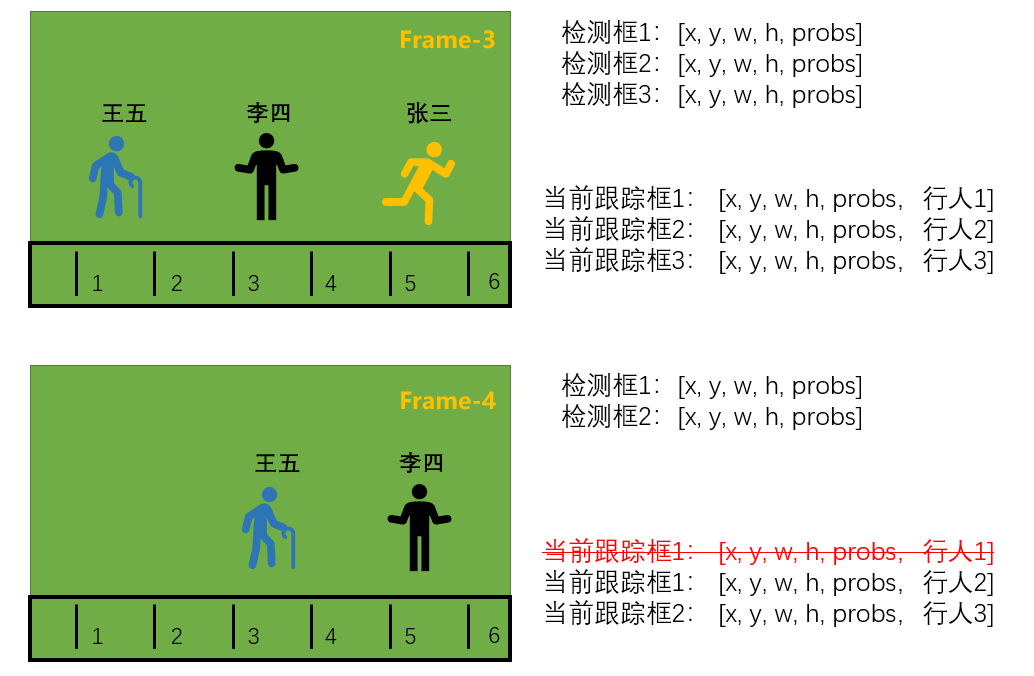
以此类推,新来检测框匹配已有跟踪框,匹配不上,则增加跟踪框,同理,已有跟踪框没有匹配到新的检测框,认为它离开了,需要删除跟踪框。
到这里,一个基础的目标跟踪框架出来了,有了新增跟踪框机制、删除跟踪框机制。这就是大名鼎鼎的SORT算法的流程,对于匹配细节和跟踪框的坐标更新
SORT很好的解决检测框如何与跟踪框对上号,同时有了新增、删除跟踪框机制,但是对于常见的问题没有得到很好的解决,例如:
- 检测器漏检:检测器在某一帧漏检是很常见的现象,假设第二帧中,张三漏检了,第二帧会将张三的身份ID——行人1给删除。第三帧中的张三将会被认为是新来的,无法匹配到他是行人1。
- 检测器误检:检测器在某一帧错误的将背景检测为了行人,根据SORT算法,会被背景赋予一个跟踪框,这是很不合理的。
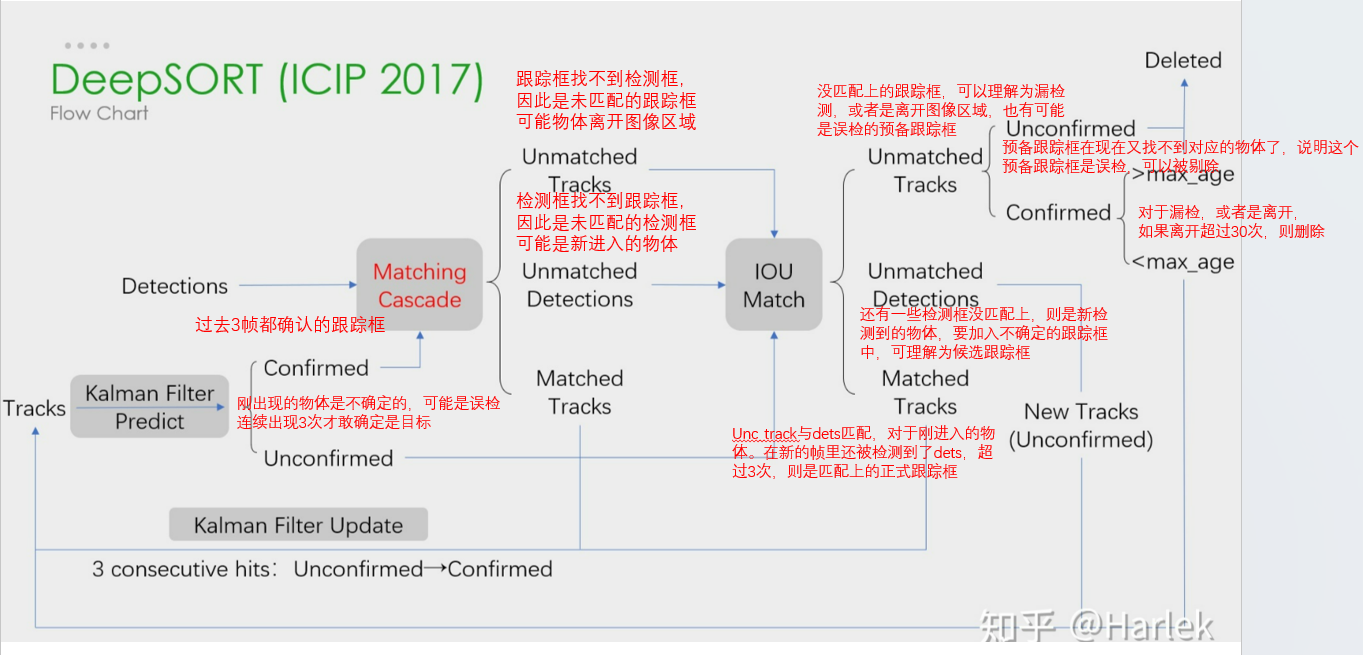
为了让目标跟踪算法输出的跟踪框更稳定,DeepSORT引入了预备框、正式框机制,可以很好的解决漏检、误检带来的不稳定。
对于新增,要考察一下框是否是真的,通常用3帧的时间来考察,当发现框连续3帧都存在,那么认为它是一个好的框,算法批准框称为正式框。这样可以很好的过滤掉一些”没有耐心“的框。这样对于某一帧,某两帧的误检,是很好的过滤方法。
对于删除,要考察一下框是否真的离开,毕竟框也是经过了准入审查的,通常不会一瞬间就离开,此时给它连续30次机会,连续30帧里边发现它都不在了,将它永久开除。
综合上述理解,DeepSORT流程解释如下:
DeepSORT核心——匹配过程
匹配过程指的是,如何将检测框与跟踪框匹配上,让每一个检测框都能找到与之对应的跟踪框。若没有找到,则认为是新进入的物体,会创建新跟踪框。
deepsort的匹配过程分两部分。
首先,基于外观特征和马氏距离,为正式框进行匹配,方法是级联匹配(matching cascade),用到的优化方法是匈牙利算法。
然后,基于bbox坐标和IoU,为预备框进行匹配,采用剩余检测框与剩余跟踪框(未匹配和预备框)匹配,用到的优化方法是匈牙利算法。
外观特征与bbox坐标对应:表示的是对于一个物体,要用什么特征表示TA,是1128的向量?还是14的向量?
马氏距离与IoU对应:表示两个特征之间"相近"程度的衡量,只有衡量了两个特征之间的距离,后续才能用优化算法优化距离最短的匹配方案
匈牙利算法作用:将N个A与M个B,采用特征向量描述以及距离度量方法,可以得到N*M的距离代价矩阵,即A中每一个元素与B中每一个元素之间的距离。随后用匈牙利算法找到最优匹配。
级联匹配
级联匹配的思想是分70级进行匹配,级的概念指距离当前帧的远近,第一级(level)采用所有检测框, 和仅被记录了一次的正式框(if tracks[k].time_since_update == 1 + level),以此循环70次。
因为越新的目标,越有可能与检测框匹配上,存在太久的目标可能离开了。级联匹配可以解决一部分身份交换问题。
级联匹配中,传入了:
distance_metric:基于外观特征(CNN提取出来的512维特征向量)的举例度量函数
max_distance:当距离大于max_distance时,认为是不匹配的
tracks:跟踪框
detections:检测框
track_indices_l:本轮需要匹配的跟踪框的index
unmatched_detections:本轮需要匹配的检测框的index
# code/chapter-8/tracking/deep_sort/deep_sort/sort/linear_assignment.py 的matching_cascade函数
for level in range(cascade_depth):
if len(unmatched_detections) == 0: # No detections left
break
track_indices_l = [
k for k in track_indices
if tracks[k].time_since_update == 1 + level # 为每个跟踪框记录它被更新的次数,优先选择新跟踪框进行匹配, 1+0
]
if len(track_indices_l) == 0: # Nothing to match at this level
continue
# ============================ 核心部分:匹配 ================================
matches_l, _, unmatched_detections = \
min_cost_matching(
distance_metric, max_distance, tracks, detections,
track_indices_l, unmatched_detections)
matches += matches_l
级联匹配中采用的是跟踪框的历史特征列表与检测框进行匹配,如跟踪框已经检测到了18次,会得到18个特征向量,新的检测框有30个,则会得到18*30的矩阵。
然后在第0维选择最小值,得到1*30的距离矩阵,最终判断是否有匹配上的检测框。
Tracker --> _match() --> gated_metric() 下的:
cost_matrix = self.metric.distance(features, targets)
跳转到:deep_sort/sort/nn_matching.py 的 NearestNeighborDistanceMetric.distance()
cost_matrix = np.zeros((len(targets), len(features)))
for i, target in enumerate(targets):
cost_matrix[i, :] = self._metric(self.samples[target], features)
跳转到:
def _nn_cosine_distance():
distances = _cosine_distance(x, y) # 18*30的矩阵
return distances.min(axis=0) # 选择距离最小的特征; 如18*1,选择18个跟踪框中与第一个检测框距离最近的;以此类推得到1*30.
# 由此可见,检测框与目标的所有历史特征向量进行距离计算,挑选最近那个特征的距离作为评判距离。
级联匹配之后,会有未匹配的检测框,未匹配的正式框(如果被记录70次以上,是无法进行匹配的),以及预备框。
接下来用IoU测量检测框与跟踪框之间的相似性,很好理解,IoU越大,它俩越有可能是一个物体。
IoU匹配
IoU匹配的代码位于:code/chapter-8/tracking/deep_sort/deep_sort/sort/tracker.py 的_match()函数,
同理采用的min_cost_matching进行匹配,传入的有iou_cost度量函数,max_iou_distance用于过滤,跟踪框,检测框,需要匹配的跟踪框的index,需要匹配的检测框的index。
# Associate remaining tracks together with unconfirmed tracks using IOU.
iou_track_candidates = unconfirmed_tracks + [
k for k in unmatched_tracks_a if
self.tracks[k].time_since_update == 1]
unmatched_tracks_a = [
k for k in unmatched_tracks_a if
self.tracks[k].time_since_update != 1]
matches_b, unmatched_tracks_b, unmatched_detections = \
linear_assignment.min_cost_matching(
iou_matching.iou_cost, self.max_iou_distance, self.tracks,
detections, iou_track_candidates, unmatched_detections)
匈牙利算法
无论是级联匹配还是IoU匹配,最后都会用到min_cost_matching函数,其中匹配的核心代码是:
# code/chapter-8/tracking/deep_sort/deep_sort/sort/linear_assignment.py min_cost_matching()
row_indices, col_indices = linear_assignment(cost_matrix) # 匈牙利算法求解,得到配对的(raw, col)
这里使用了scipy库的linear_sum_assignment实现,可返回最优匹配的坐标,到底匈牙利算法是如何解决分配问题,下面进行介绍。
匈牙利算法是1955年美国数学家哈罗德·库恩((W.W.Kuhn)),基于匈牙利数学家康尼格(D.Kőnig)提出的康尼格定理,提出求解二分图最大匹配的一种方法。
二分图( Bipartite graph,二部图)是图论中一种模型,指的是有A,B两个节点集合,存在一系列边,边的两端不能再同一个集合,简单说就是A只能和B相连,反之亦然。
为了求解分配问题,需要对二分图中每种可能进行代价描述,称之为代价矩阵(系数矩阵、变换矩阵等等)。
下面借鉴视频中的内容,简要介绍匈牙利解决二分图最大匹配问题。
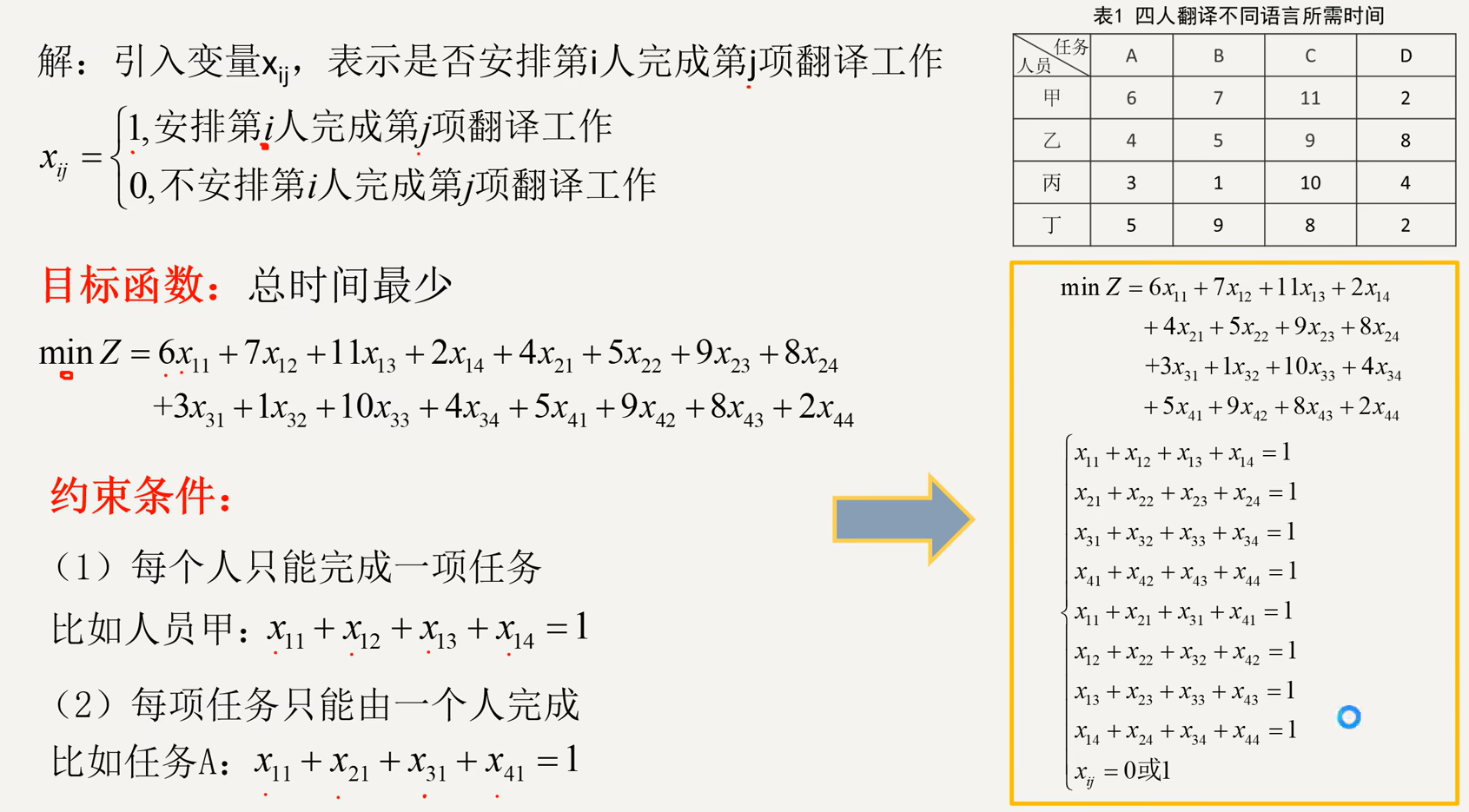
假设有一本说明书,需要翻译成4种语言,现在有4个人,他们对每个语言的熟悉程度不同,因此如何分配任务,就是一个典型的二分图最大匹配问题。
首先,可以根据任务进行量化,得到目标函数min Z。
然后,设置约束条件,一个人选一个语言,一个语言只能被一个人选择。
最后,得到右下角的方程式。
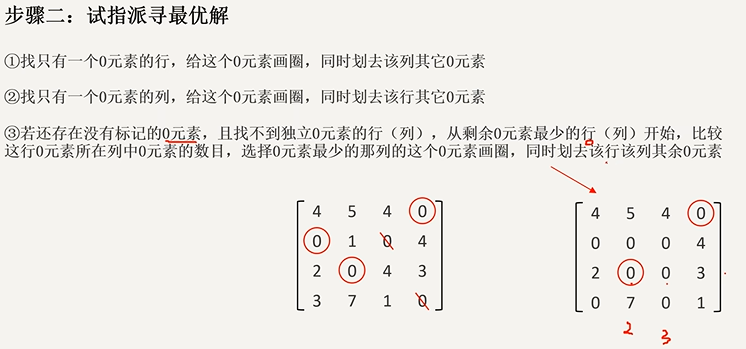
匈牙利算法实现步骤是:
- 画圈,划0:对代价矩阵每行减去最小值,使得其出现0;然后对列进行同样操作,使得其出现0;
试指派寻找最优解:0表示最优解,一行只有一个0的话,肯定优先考虑分配。
- 因此按行找仅有一个0的行,并且分配,分配之后,行已经被分配,因此对应的行需要删除。
- 同理对列操作。
- 若还存在没有标记的0元素,且找不到独立0元素的行(列),从剩余0元素最少的行(列)开始,比较这行0元素所在列中0元素的数目,选择0元素最少的那列的这个0元素画圈,同时划去该行该列其余0元素。(如绕口令一般,这里推荐看视频)
打勾,画圈:没有画圈的行打√,打勾行含划0元素的列打√,打√列含画圈0元素的行打√,未打√的行画横线,打√的列画竖线。
- 增加0元素:寻找未被直线覆盖部分的最小元素,打 √的行减最小元素,打 √ 的列加最小元素。
- 重复执行2-4,直到找到n个位于不同行不同列的0元素。
其核心思想是用增广路求最大匹配,这里的行列操作实际是将增广路的思想转换为矩阵的表达,因此单纯观察匈牙利算法的矩阵解法,是很难理解其原因,建议通过图论、运筹学的基础知识去了解匈牙利算法求解过程。
更多目标跟踪中的匈牙利算法讲解推荐:
代码细节:
对于代价矩阵,行是tracks, 列是dets,匹配上的框才会有index返回。
DeepSORT核心——更新输出过程
卡尔曼滤波
由于目标检测算法的不稳定,直接用目标检测输出的检测框来表示目标位置的精度不佳,常常会看到框的抖动。
为了让框更稳定的描述物体的位置,deepsort中采用了卡尔曼滤波算法(Kalman filtering)来对目标位置进行输出。
卡尔曼滤波算法是斯坦利·施密特(Stanley Schmidt)在1958年提出的,当时要解决的是阿波罗飞船的导航问题,可以用于估计飞船的位置,是一个很好的运动估计。
随后,卡尔曼滤波广泛应用在天文,宇航,气象等领域。
卡尔曼滤波可以解决的核心问题是,在一个线性动态系统中,可以基于历史信息与当前输入信息,很好的估计当前最优信息,当前最优信息就是卡尔曼滤波的输出,它可以很好的过滤掉噪声(必须是高斯噪声)。
这里的历史信息,可以理解为跟踪框(tracks)(上一帧),当前输入信息是目标检测算法输出的检测框(dets),而当前时刻deepsort要输出的目标的位置,是dets+tracks经过卡尔曼滤波算法的输出,即一个当前最优信息,是一个预测的、估计的值。
为了对卡尔曼滤波有进一步认识,这里简要介绍卡尔曼滤波思想和概念。对于细节,推荐阅读图说卡尔曼滤波,, 从放弃到精通!卡尔曼滤波从理论到实践~
这里借用视频中的公式进行讲解过程,公式中更细节内容,可以参考卡尔曼滤波的五大公式
x:观测对象,例如卫星的坐标,图像中目标的坐标,水壶中的温度等。
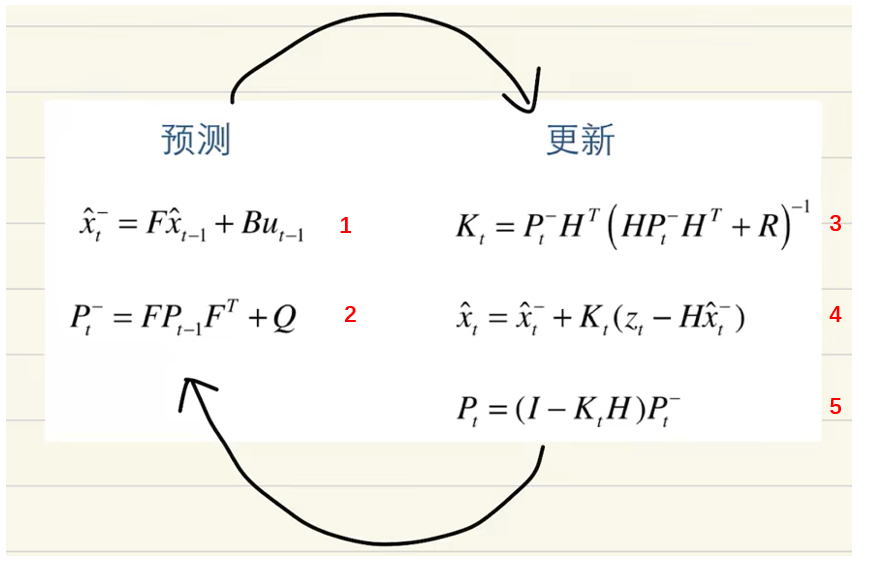
x:观测对象,例如卫星的坐标,图像中目标的坐标,水壶中的温度等。
t:表示时刻
-:表示估计值
^:表示估计,由于x都是带着^的,这里可以不加以区分
F:状态转移矩阵
P:协方差矩阵
K:卡尔曼增益,用于权衡,历史信息与当前输入信息的重要程度。
对于目标跟踪算法的输出,是公式4,公式4也是最核心的内容,其余公式都在为公式4服务的。
为了理解公式4,借鉴文章如何通俗直白地理解卡尔曼滤波算法的讲解。
假设,有两台电子秤,分别进行测量一瓶水,得到的结果如图所示。
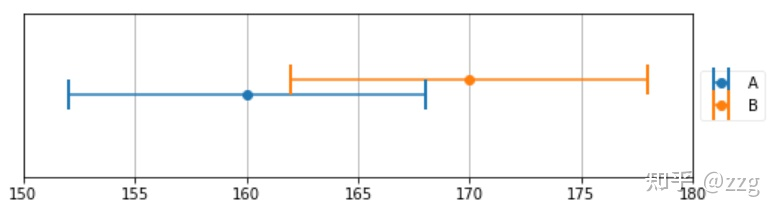
由图可知,电子秤不是绝对精准的,存在一定误差,不过当前观测值分别是160和170,那么如何融合两个数据? 最简单的是 M = (A+B)/2 = 165。
求平均的设想里,有一个重要前提是,认为A和B的贡献是一样的,重要程度是一样的,因此各占50%的权重。
如果,A的精度更高,B精度差一些,即A的方差小一些,B方差大。这时,平均就不合适了,应该让精度高的观测值的权重更高。
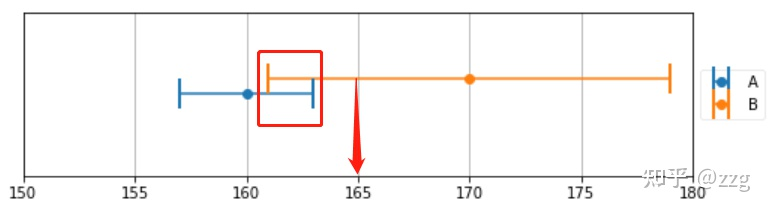
权重的计算,需要考虑谁更重要,即方差更小,所以可以通过方差的比较获得权重分配。
A 测量结果 为 160 +- 3, B 测量结果 为 170 +- 9,可知A 的测量结果精度是 B 测量结果精度的 3倍。

这个公式是理解上述公式4的关键,通过将A提取出来,变为单独一项,就可以很好的衡量,基于A,要如何变更,得到最优估计值。
这里的变更加号的右边,B-A乘以一个权重,这个权重就是卡尔曼滤波中的卡尔曼增益K。其中B就是目标检测算法输出的dets,A是tracks。
而卡尔曼增益K的计算,需要依靠协方差矩阵P。
DeepSORT 小结
到此,总结一下卡尔曼滤波过程,当前帧跟踪框的信息由卡尔曼滤波器在更新阶段输出。
更新阶段需要使用到:当前帧检测框, 基于上一帧跟踪框的预测值,并且加权得到。
其中,上一帧跟踪框的预测值来自公式1。代码中是: self.tracker.predict()。
有了基于上一帧跟踪框的预测值,再输入dets,就可以得到当前帧跟踪框信息,代码中是: self.tracker.update(detections)。
在代码中,卡尔曼滤波器维护mean和covariance,分别表示公式中的预测值x,协方差矩阵P。
self.mean, self.covariance = kf.predict(self.mean, self.covariance) # mean即bbox的坐标数据
self.mean, self.covariance = kf.update(self.mean, self.covariance, detection.to_xyah())
到这里,deepsort原理有了大概的描述,更多细节仍需要到代码中观察,这里做一个简要回顾。
跟踪框的输出:
为了更稳定,采用了卡尔曼滤波算法,将当前帧检测框信息,结合卡尔曼滤波对当前帧的预测,两者共同作用,得到输出。
目标的匹配:
为了让检测框找到对应的,合适的跟踪框,把它转化为二分图最大匹配问题,可以用匈牙利算法很好的求解。
同时,为了匹配更精准,减少身份交换,deepsort先进行新目标框的匹配(仅限前70级,级表示被跟踪的次数),然后再进行基于IoU的匹配。
跟踪框准入准出:
为了避免漏检、误检等短暂的不稳定因素,设计了预备框和正式框的概念。经过3次考验,可转正,经过30次机会仍不靠谱(未检测到),开除X籍。